=== DJI製マルチローターコントローラー「NAZA」の設定 ===
◆ DJI NAZA取扱説明書(日本語マニュアル)
これは、原本「Naza User Manual v2.7」を元に、日本語版として私が作成したものです。
信頼性はまったくありません。
![]() DJI NAZA取扱説明書(日本語マニュアル)のダウンロード
DJI NAZA取扱説明書(日本語マニュアル)のダウンロード
原本「Naza User Manual v2.7」は
http://www.dji-innovations.com/products/naza-multi-rotor/downloads/
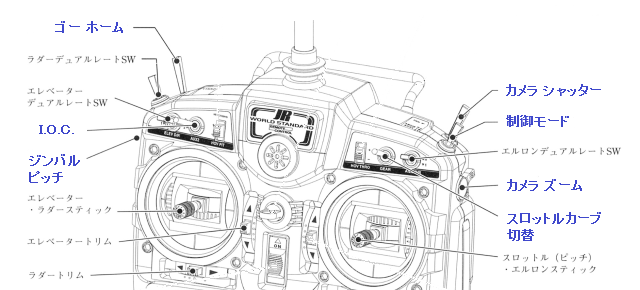
◆ プロポの設定
どうも、DJIはFUTABAプロポをターゲットとしているみたいです。
・ニュートラルが1520μs。
・S-BUSはサポートしているが、JRのエクストラアンテナは接続できない。
(私の場合)
送信機: JR DSX9 受信機: JR RD931
◆ NAZAの設定 (飛行前)
万が一の誤動作で、怪我をすることが無いよう、全てのプロペラをはずしておきましょう。
MCとPCとをUSBケーブルで接続する。
アシスタントソフトウェアを起動する。

送信機の電源をON にする。
マルチコプターの電源をON にする。
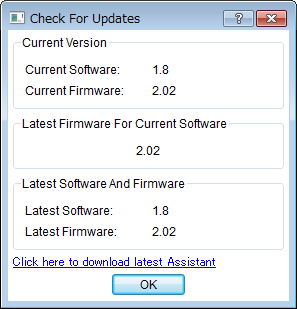
「OK」をクリックする。
左下のランプにおいて、緑が点灯、青が点滅していればMC と通信状態にあります。
電源投入後、MCの全ての設定データが自動で読み込まれますが、 不安な時や設定変更がMCに反映されているかどうかチェックする時は「READ」をクリックします。
「READ」 と「WRITE」 は、現在のページのみに適用されます。
もし、途中でマルチコプターの電源をOFFすると、赤が点灯、青が消灯します。
![]()
マルチコプターの電源をONにするだけで、(設定可能に)戻ります。
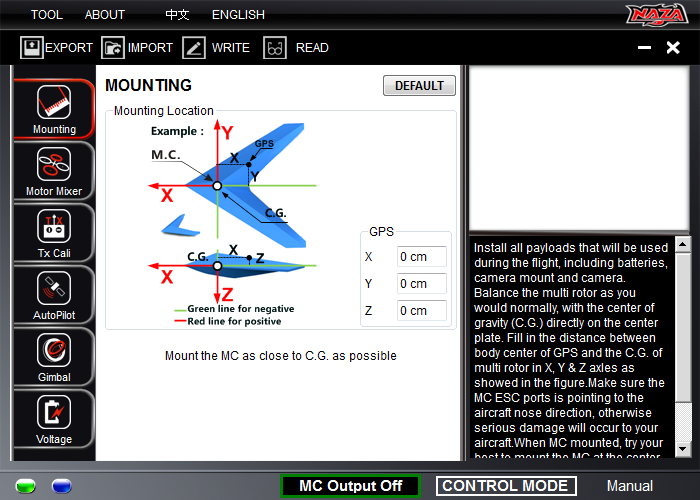
● Mounting (GPS/コンパスモジュール付)
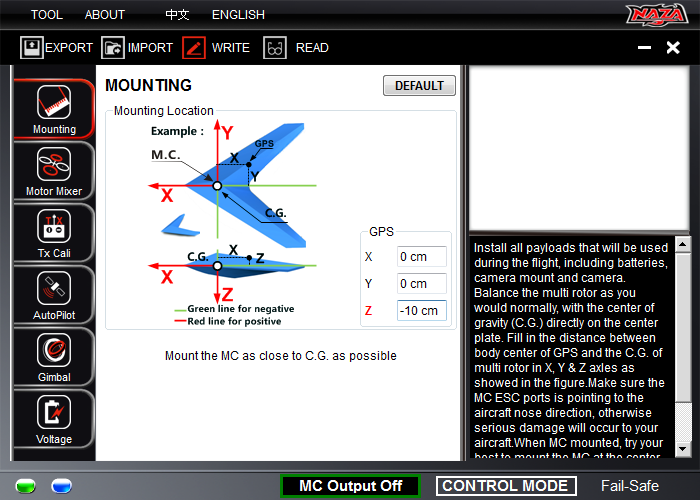
Mounting Location
GPS/コンパスモジュールの取り付け位置のオフセット値を入力します。
図の赤矢印がプラスです。
値を変更するには、その欄(テキストボックス)内をドラッグ![]() し、値を入力します。 単位の入力は不要です。
し、値を入力します。 単位の入力は不要です。
変更後は、「WRITE」 をクリックします。 赤色Zが黒色に変わります。
各ページ(項目)において、値が変更された時は、Zのような変数名か値の色が赤色に変わります。
「WRITE」 をクリックすると、黒色になり、MCに反映したことを意味します。
さらに変更が反映されているかを確認したければ、「READ」をクリックするとよいでしょう。
● Motor Mixer
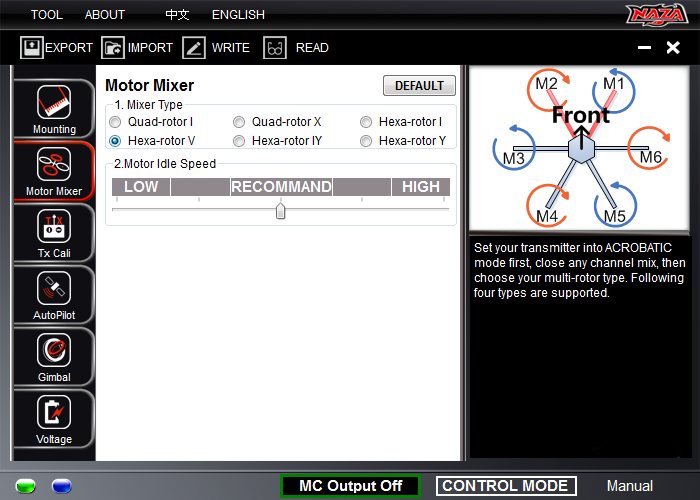
1. Mixer Type
マルチコプターのタイプを選択します。
2. Motor Idle Speed
そのまま(RECOMMEND)でよいでしょう。
● Tx Cali
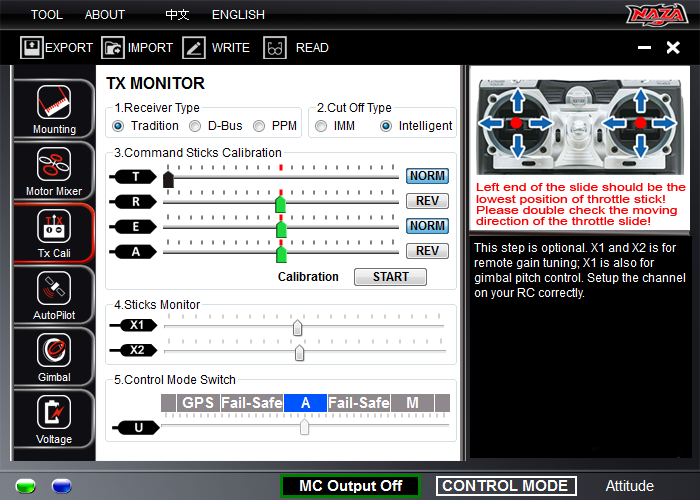
1. Receiver Type
2.4GHzやPCMの場合は「Tradition」、FUTABAのS-BUSの場合は「D-Bus」を選択します。
2. Cut Off Type
「Intelligent」 がよいでしょう。
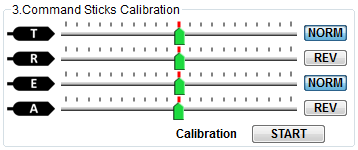
3.Command Sticks Calibration
T(スロットル) ・・・ 左がLow、右がHighです。
R(ラダー) ・・・ 左が左、右が右です。
E(エレベーター)・・・左がアップ、右がダウンです。
A(エルロン) ・・・ 左が左、右が右です。
つまり、スティックとの関連性は、「左右は左右、左が下、右が上」と覚えればよいでしょう。
・送信機のスティックを動かしてみて、方向が一致するように、「NORM/REV」をクリックします。
送信機側でリバース設定しても構いません。
・キャリブレーションを行います。
Calibration 「START」 をクリックします。
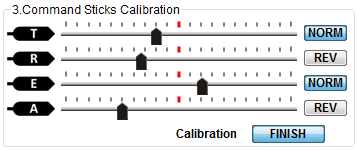
カーソルがランダムに動きます。
スロットル、ラダー、エレベーター、エルロン 各スティックを可動範囲いっぱいに上下左右に2回以上往復させます。
カーソルが左右いっぱいに動き、スティックがニュートラル位置でカーソルがセンター(緑)になればOKです。
スティックはランダムに動かすのではなく、各チャンネル毎にカーソルを確認しながら行うとよいでしょう。
「FINISH」 をクリックします。
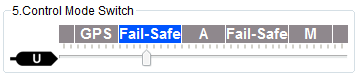
5. Control Mode Switch
MCのポートUが接続されている送信機の3ポジションスイッチ(制御モードスイッチ)を動かして、
それぞれの領域が青になるように調整します。
制御モードスイッチを「Atti.」位置にし、A が青になるように、サブトリムを調整します。
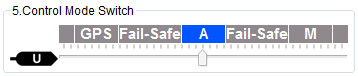
制御モードスイッチを「Manual」位置にし、M が青になるように、エンドポイントを調整します。
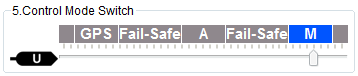
制御モードスイッチを「GPS Atti.」位置にし、GPS が青になるように、エンドポイントを調整します。
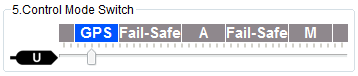
フェイルセーフ時に、Fail-Safeが青になるようにします。 Fail-Safe 位置はAの左右どちらでも構いません。
私は、MIX スイッチ(スロットルホールドスイッチ)をON でFail-Safe 位置に移動するように、ミキシング機能を使いました。
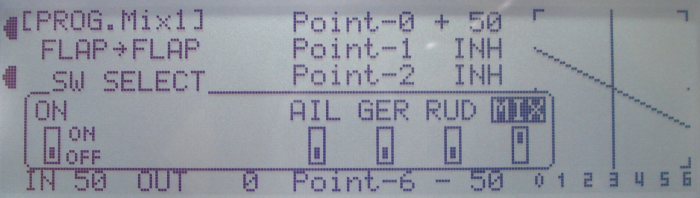
もちろん、受信機のフェイルセーフも、この位置を記憶させています。
(参考) DSX9 で、全チャンネルをフェイルセーフ設定するには
1) 受信機にバインドプラグを挿入する。
2) 受信機の電源をON する。
3) 受信機のLED が点滅しているのを確認して、バインドプラグを抜く。
4) 送信機のスティックやスイッチ位置をフェイルセーフ位置にする。
5) 送信機のボタンを押しながら、電源をON する。
6) 受信機のLEDが常時点灯すれば完了。
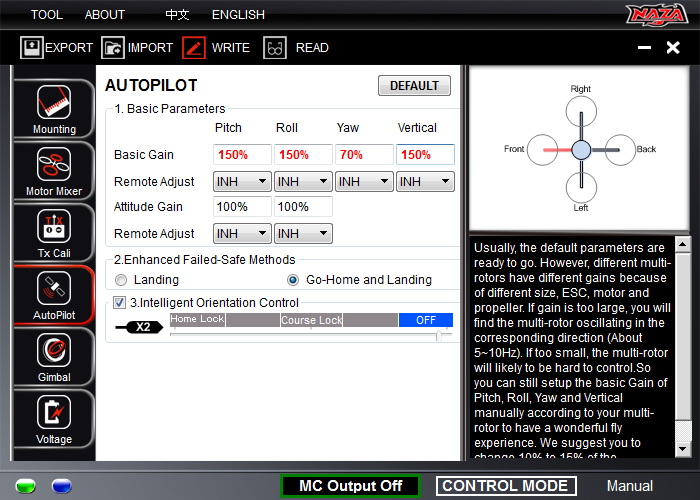
● AutoPilot
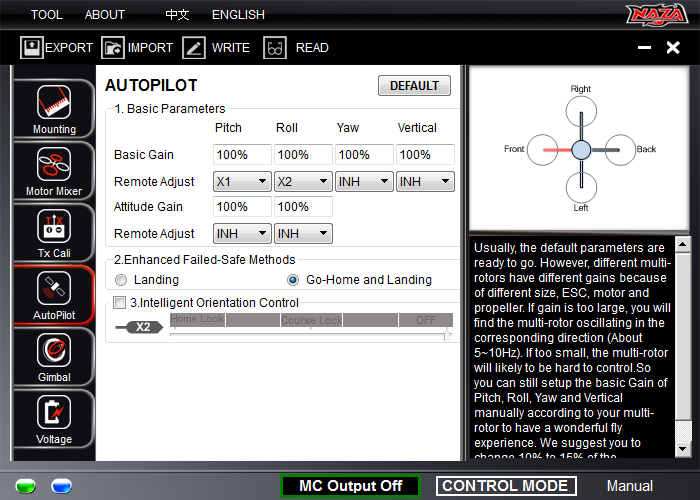
1. Basic Parameters
「DEFAULT」をクリックすると、全て100% になります。
リモートゲインチューニングを使って、飛行テストを行います。
まずは、Remote Adjust の Pitch をX1 に、Roll をX2 に設定します。
X1、X2 は送信機のレベルボリューム(LV)チャンネルに割り当てるとよいでしょう。
LV がニュートラルの位置でゲインを100% に設定しておくと、LV 操作で、ゲインは50% ~ 200% まで可変できます。
ニュートラル位置を1倍として、1/2倍 ~ 2倍変化できます。
(飛行場において)Pitch とRoll の調整が終わったら、次にYaw とVertical をX1、X2 に割り当て、
順々に調整すればよいでしょう。
設定可能なゲインの範囲は
Basic Gain
Pitch 20% ~ 500%
Roll 20% ~ 500%
Yaw 30% ~ 300%
Vertical 50% ~ 200 %
Attitude Gain
Pitch 40% ~ 400%
Roll 40% ~ 400%
2. Enhanced Failed-Safe Methods
「Go-Home and Landing」を選択し、テスト飛行してみましょう。
3. Intelligent Orientation Control
現在X2ポートはリモートゲインチューニングで使用しますので、ゲイン調整が終わってから使用します。
「WRITE」 をクリックします。
● Gimbal
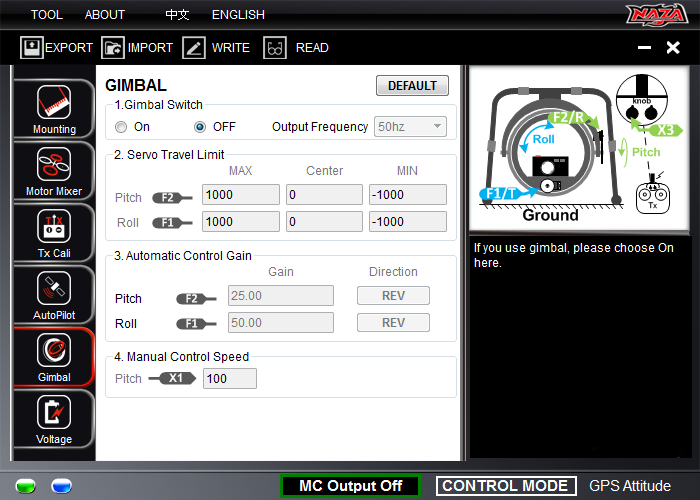
1. Gimbal Switch
「OFF」 を選択します。
ジンバルのピッチコントロールにX1ポートを使用しますので、これもゲイン調整が終わってから使用します。
MCのF1ポートおよびF2ポートからは、信号が出ていますので、ジンバル制御用サーボは接続しません。
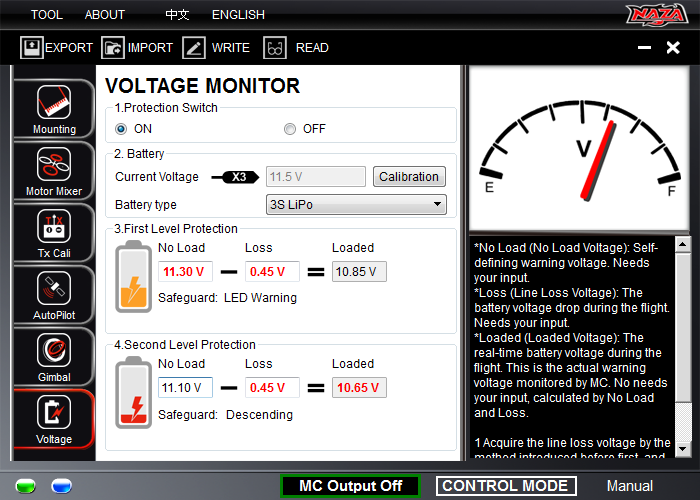
● Voltage
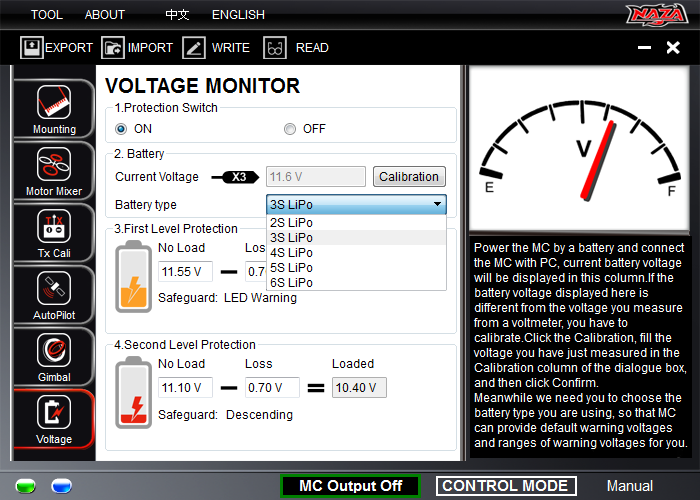
1. Protection Switch
「ON」 を選択します。
2. Battery
Battery Type
使用するLi-Poバッテリーのセル数を選択します。
Current Voltage 「Callibration」 をクリックします。
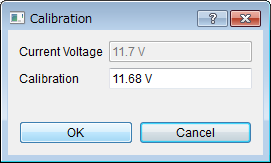
Calibration の欄に信頼のおける電圧計で測定した電圧を入力します。
「OK」 をクリックします。
3. First Level Protection
数値はこのままにしておきます。 テスト飛行後に調整します。
4. Second Level Protection
数値はこのままにしておきます。 テスト飛行後に調整します。
「WRITE」 をクリックします。
● IMU Calibration

「TOOL」 ⇒ 「IMU Calibration」 を開きます。
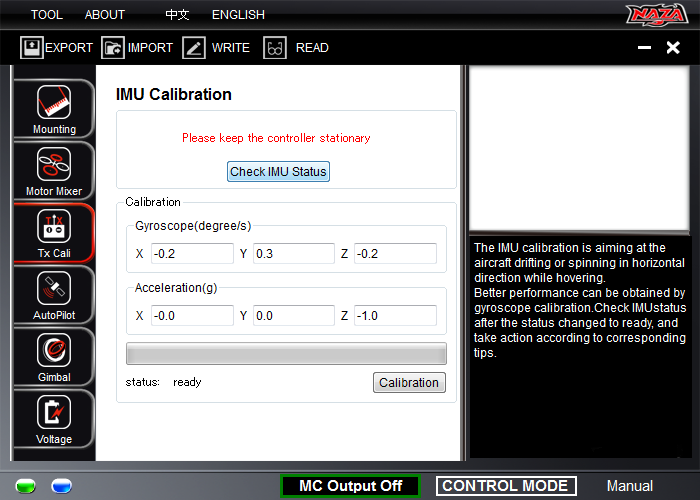
「Check IMU Status」 をクリックします。
このようなメッセージがでれば、キャリブレーションの必要はありません。
でも、やってみましょう。
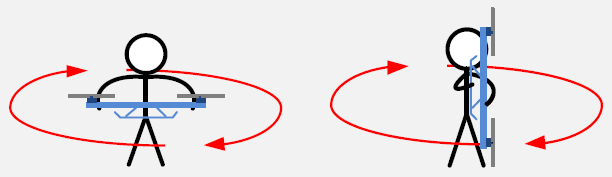
機体を振動のない安定した場所に置きます。 特に水平でなくてもいいですが、
キャリブレーション中は絶対に機体を動かさないこと!!
「Calibration」 をクリックします。
これで、アシスタントソフトウェアによる飛行前の設定は終わりました。
電源を切り、USBケーブルを抜きます。
◆ デジタルコンパスの校正
周囲に鉄などの強磁性体がある場所は避けてください。
送信機、マルチコプターの順に電源をON します。
制御モードスイッチを、Manual ⇔ GPS Atti.間で、すばやく6~10回カチッカチッ・・・と往復(切替)させます。
VU のLED が黄色で常時点灯します。
マルチコプターを水平に持ち、1週以上回します。 LED が緑色で常時点灯。
マルチコプターを垂直に持ち、LED が消灯するまで回します。
もし、LED が赤色で高速点滅したら失敗ですので、場所を変えて、再度行います。
<以上で飛行前の設定は終了しました>
この後、飛行場にて、ゲイン調整などを行います。
◆ ゲイン調整
Basic Gain
Pitch
エレベータで、前後に揺さぶります。
ゲインを上げていくと、スティックをニュートラルに戻した時、揺れる感じが見えてきます。
揺れがなく、素直に水平に戻るまでゲインを下げます。
Roll
エルロンで、左右に揺さぶります。
ゲインを上げていくと、スティックをニュートラルに戻した時、揺れる感じが見えてきます。
揺れがなく、素直に水平に戻るまでゲインを下げます。
Yaw
ラダーの舵を入れたときと抜いたときに、機体が一瞬上昇します。(上下変動)
ゲインを高くすると、この現象が顕著に現れます。
ゲインを下げるとこの現象が少なくなりますが、スティックをニュートラルに戻した時の止まりが悪くなります。
ゲインを下げても、ヨー軸方向に回転(ヘリのテールが流れる)することは、まったくありません。
この現象は、Vertical ゲインを上げることで、少しは改善されます。
Vertical
スロットルをあおってやります。
ゲインを上げていくと、モーター音が「ビーン」から「ビ・ビーン」さらに「ビ・ビ・ビーン」という音になります。
「ビーン」という音になるまで、ゲインを下げます。
Basic Gain においては、おおむね次のことがわかりました。
・ ローター数が多いほど、ゲインは高く設定できる。
・ 機体が重いほど、ゲインは高く設定できる。
・ 重心位置が低いほど、ゲインは高く設定できる。
Attitude Gain
これは、打の効き具合を調整するものです。 私の場合は、空撮目的なので、100% で充分だと感じました。
少し高めに設定して、プロポのD/RやEXPで調整するのもよいかもしれません。
ゲイン調整の手順として、
・ 飛行して、Pitch とRoll のゲインを調整します。(既にX1、X2 に割り当てています)
・ MCとPCを接続し、アシスタントソフトウェアを起動し、現在のゲイン値を読み込みます。
・ Pitch とRoll の読み込んだ値より少し低めの、きりの良い数値を入力します。
・ Pitch とRoll のRemote Adjust をINH にします。
・ 送信機のLV(X1とX2 に対応したチャンネル)をニュートラルに戻します。
・ 次に、YawとVertical のRemote Adjust をX1、X2 に割り当てます。
・ 「WRITE」をクリックします。
を繰り返して、Basic Parameters の全てのゲイン値を決めていきます。
◆ バッテリー低電圧警告の設定
VU のLED が見える状態で、ホバリングさせます。
LED が赤点滅を始めたら、即座に着陸させます。
アシスタントソフトウェアを使って、Voltage 項目を表示させます。
Current Voltage (現在の電圧)から「3.First Level Protection」のLoaded 値を引いた値がLoss 値となります。
Loss の欄に記入します。
3.First Level Protection のNo Load 値は、残量20%で11.3V位です。(3セルの場合)
4. Second Level Protection のNo Load 値は、Li-Po の規定値の11.1V としました。
変更後は、「WRITE」 をクリックします。
◆ Go Home & Landing のテスト
現在の高度が20m未満の時
高度20mまで上昇し、ホームポイントの真上まで移動し、15秒間ホバリング
現在の高度が20m以上の時
現在の高度でホームポイントの真上まで移動し、ホームポイントの真上20mで15秒間ホバリング
その後、ゆっくり着地し、モーターが停止します。

(注意)
・ マルチコプターの電源をONにした場所がホームポジションとして記憶されるので、注意してください。
・ GPSの誤差は2.5m位あるので、自動車などの近くで電源をON しないようにしてください。
・ 最初は、いつでも手動操作に切り替えできるように送信機を持っていてください。
◆ I.O.C.(Inteligent Orientation Control)の設定
全てのゲイン調整が終わったら、X2チャンネルをプロポの3ポジションスイッチ(私はFLAPスイッチを使用)に設定します。
ポジション-1(中間)で、Course Lock が青になるように、送信機のサブトリムを調整します。

ポジション-0 で、OFF が青になるように、送信機のエンドポイントを調整します。

ポジション-2 で、Home Lock が青になるように、エンドポイントを調整します。

おそらく、無調整でOK でしょう。
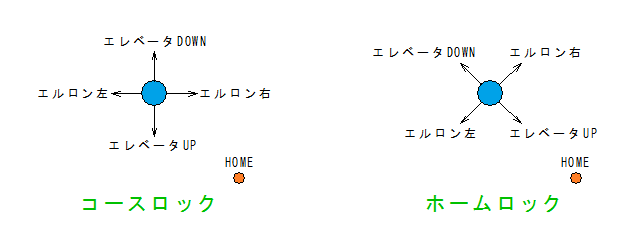
◆ I.O.C.のテスト
機首方向に関係なく、エルロンとエレベータ操作で下図のように機体が移動します。
飛行中にラダーで機首方向を変えても操作は同じです。
前方向の記録
2チャネルスイッチをすばやく3~5回OFFとコースロック間でスライドすることにより、いつでも新しい機首方向を前方向として記録することができます。
ホームポイントの記録
制御スイッチを、コースロックとホームロック間で、すばやく3~5回スライドすることにより、現在の位置を新しいホームポイントとして記録することができます。
これを行うとゴーホーム時のホームポイントが変更されます
(注意)
・ ホームポイント近くでホームロックを使用するきは注意してください。 これは、操縦者の頭がこんがらがります。
・ 普通にRCヘリコプター等が操縦できる人がI.O.C.を使うと、間違った操作をするかもしれません。
・ 遠く離れて機首方向が分からなくなったとき、ホームロックに切替、エレベーターUP操作で機首が確認できる距離まで寄せてきて、ホームロックを閉じるのが良いと思いました。
・ 「すばやく」の意味は、ゆっくりすぎてはだめです。また、「3~5回」とは、3回未満や6回以上ではだめです。地上でテストしてみてください。緑LEDが点滅すればOKです。
◆ Gimbal の設定 (空撮目的でなかったら不要です)
これは、室内で行うのが良いでしょう。
MCのX1ポートに接続されたチャンネルに送信機の好みのデバイスを割り当てます。
私の場合は、FLAP LV のままです。
MCのF1ポートにジンバルのピッチ制御サーボを、F2ポートにジンバルのロール制御サーボを接続します。

1. Gimbal Switch
「On」 を選択します。
Output Frequency
アナログサーボの場合は50Hzにします。
デジタルサーボの場合は、それより高い周波数でもOKだと思いますが、200Hz以下で十分だと思います。
2. Servo Travel Limit
機械的に干渉しないように、最大値を決定します。
3. Automatic Control Gain
機体を前後左右に傾けてもカメラマウントが水平になるよう、Gain(制御量) とDirection(制御方向)を調整します。
4. Manual Control Speed
数値を小さくすると、送信機で過激なピッチ操作を行っても、サーボがゆっくり遅れて動くようになります。
自動調整には影響しません。
スイッチ操作でピッチを変える場合は、低い値がよいでしょう。
(ただいま、更新中です)
コメント (158)
初めまして。
私も、最近から DJI NAZA F450 を組み立ててセッティング段階まで来ました。
そこでアドバイスを頂けたらと思いまして・・・
IMU キャリブレーションを掛けたのですが、エルロン右への微かなズレが消えません。
対処として、
トリムとかサブトリムを使ってもよろしいのでしょうか?
当方は、フタバ 8FG を使ってます。
よろしくお願い致します。
投稿者: 敏ボー | 2013年02月20日 21:06
日時: 2013年02月20日 21:06
ご質問ありがとうございます。
Command Sticks Calibrationの項目ですね。
緑色の矢印がセンターにならないとのことですね。
まず、最初にNOR/REVで、方向を合わせてください。
このとき、
もし、REVで方向が正しいなら、IMU側をNORに、プロポ側をREVにする
もし、NORで方向が正しいなら、IMU側をREVに、プロポ側もREVにする
として、再度キャリブレーションを試みてみてください。
それでも、だめなら、サブトリムか、エンドポイントで補正してみてください。
右にずれるということなので、右のエンドポイントを下げてみてください。
(厳密にいえば)
フタバ 8FG の仕様を知らないのですが、サブトリムを使った場合、左右のエンドポイントがずれるのでしょうか? ずれればOKです。ずれなければ、左右のトラベル量が同じでなくなります。
左右の変化量は100%変化で400μSecで、フタバの場合はニュートラルが1520μSecなので
1120 - 1520 - 1920
が、理想ですが、送受信機の個体差で左右のトラベル量が等しくない場合もあるかと思います。
とりあえず、以上のことをお試しください。
投稿者: まーぴー(管理者) | 2013年02月21日 11:45
日時: 2013年02月21日 11:45
コマンド・スティック・キャリブレーションではなく、
「TOOL」 ⇒ 「IMU Calibration」の方です。
F450を会社工場の外的要因(風)の無い所で浮かせて、エルロン右にタラ~ッと流れるので
IMU キャリブレーションを掛けても、
前よりは良くなりましたが、まだ流れるのです。
流れるのを止める為に、トリムかサブトリムを使っても良いのか・・・?
なんです。
よろしくお願い致します。
投稿者: 敏ボー | 2013年02月21日 18:32
日時: 2013年02月21日 18:32
失礼しました。
IMUキャリブレーションにおいて
XYZ各値が、-1.5〜+1.5 及び 各値の2乗の和が約1 となればOKである。
と説明書には書かれています。
この条件を満たしているのに、右に流れるのですね。
無風時に右に流れるということは、機体が右に傾いているはずです。
マルチコプターは、ヘリコプターと違い、水平でホバリングします。
MC内の水平センサーにより、検出され、自動制御されます。
MC本体が機体と平行に取り付けられているでしょうか?
ハーネス等の影響で、傾いていませんか?
MC上部に軽量のモノサシなどを貼り付けて、機体と平行であることを確認してみてください。
MCが水平状態で、XYZの値がゼロにならないなら、不良品かも、、、、、
ESCのキャリブレーションは行ないましたか?
左右のモーターを入れ替えてみては、アームごと、どうでしょうか?
Basic Gainの設定値は?
機体からしてピッチ、ロール共、100〜150%で良いと思います。
ヨー軸は50〜100%で、高くすると垂直方向に影響します。
最後は、トリムに頼るか、MC本体を少し右に傾けて装着するかですね。
投稿者: まーぴー | 2013年02月21日 19:45
日時: 2013年02月21日 19:45
度々参考にさせていただいております。
今年から、HEXコプターの機体を制作しています。
機体が完成しアシスタントソフトウェアでセッテイング中しているのですが
Autopilotのページで3のIntelligent Orientation Contorolの
チャックが入らないのでのす。いろいろと試しましたがわかりません。
何か根本的なものでしょうか。
よろしかったらご回答ください。
投稿者: 匿名 | 2013年02月24日 17:29
日時: 2013年02月24日 17:29
すみません、先ほどの投稿者です。名前入れてませんでした。
投稿者: sbr5544 | 2013年02月24日 17:39
日時: 2013年02月24日 17:39
はじめまして、リリーの日記の管理者をしております、脇本と申します。
X2はIOCとRenote Gain tuningを兼ねております。
4.Autopilotの項目で、X2を使用しておられませんか?
そうでしたら、INHにしてください。
同様に、5.Gimbalはx1を使用しますので、Remote Gain tuningでx2を使用していた場合は利用できません。
以上、ご確認ください。
もし、そうでなければ、また、コメントかメールください。
投稿者: まーぴー(管理者) | 2013年02月24日 18:13
日時: 2013年02月24日 18:13
お世話になります。
X2を他に使用はしていませんがチェックは入りません。
アシスタントソフトウェアのみを起動してIntelligent Orientation Contorolに
チェックは入るのですが接続しますと、チェックが入らないようになります。
なんでしょうか。
投稿者: sbr5544 | 2013年02月24日 19:27
日時: 2013年02月24日 19:27
実物を見ることができないので、失礼なことを申し上げるかもしれませんが、お許しください。
(ハードウェア構成)
IOC機能を使うには、GPS/コンパス モジュールが必要になります。
誤配線は、ないでしょうか?
(古いタイプでは)GPS/コンパス をサポートしていない場合があるようです。この場合、ファームウェアのアップデートが必要です。
とりあえず、ご確認ください。
投稿者: まーぴー(管理者) | 2013年02月25日 12:13
日時: 2013年02月25日 12:13
度々ありがとうございます。
結論から言いますとどうも、GPSモジュールが故障しているようでした。
昨年、NAZAが出てからすぐに本体を買い、その後GPSモジュールが出た時に
クワッドで遊んでまいりました。(一度立ち木に接触、かなり激しい墜落しました)
本年に入りHEXコプターの組み上げを開始し、設定をしましたが
よく見るとGPSモジュールをつないでもメインLDEの点灯が
Attiモードの点灯にしかなくなりました。
モジュールはGPSV2になっているようなので今度そちらを購入してみようかと
思います。
投稿者: sbr5544 | 2013年02月26日 16:16
日時: 2013年02月26日 16:16
はじめまして、
最近DJI NZAZA GPSで空撮を楽しみたいと思い購入しました。
そこでお聞きしたいのですが GO HOMEの設定をMIX SWを使って何とかミキシングできました。
結果ミキシングSW切替えでアシスタントソフトのTX Cali画面のUスライダーはGPSとFailSafeになることを確認しました。
しかし、コントロールモードSWでAモードにしてミキシングSWを切替えるとUスライダーのAの右側FailSafeに入ってしまいます。
これをGPSモードの時のみFailSafeになるようなミキシングのかけ方があれば教えて頂きたいのです。
プロポはJR XG8を使用してます。
投稿者: Henderu&gureteru | 2013年03月13日 21:33
日時: 2013年03月13日 21:33
Henderu&gureteruさん、こんにちは
私も、あなたと同じ設定で使用しております。
FailSafe位置は、左右どちらも同じだとおもいますので、現在の設定でテストしてみてはいかがでしょうか?
もし、初めての飛行でしたら、
離陸は Atti.モードで行い、浮上してから、GPS Atti.モードに移行してください。
(GPSの誤差のため)
Go Home &Landing を途中でキャンセルする場合は、FailSafeモードから抜け、いったん、Normal、Atti.モードに移行し、その後、GPS Atti.やAtti.モードに戻して飛行させます。
GPS Atti.モードだとキャンセルできません。
以上、お試しください。
投稿者: まーぴー | 2013年03月14日 09:19
日時: 2013年03月14日 09:19
先日は、アドバイスを有難う御座いました。
又、厄介な悩みがでました(涙
VUのLEDですが、
Attiモードで飛ばすとオレンジの低速点滅になる訳ですが・・・
私のNAZAは低速1回点滅になったり、高速2回点滅になったり・・・
見間違いかも知れませんが、オレンジの点滅の前に一瞬
緑色が混じる点滅をする事が有ります。
これって、ヤバいですよね・・・?
http://www.youtube.com/watch?v=6iSTgQSqO6w&feature=share
動画から判断出来るアドバイスが有りましたら、宜しくお願い致します。
投稿者: 敏ボー | 2013年04月02日 20:28
日時: 2013年04月02日 20:28
取扱説明書によると
Atti.モードにおいては、オレンジ(黄色)が点滅するように書かれています。
したがって、正常ではないかとおもうのですが・・・
私の場合はGPSコンパスを使っているので
Atti.モードにおいては、赤色が点滅します。
投稿者: まーぴー(管理者) | 2013年04月02日 20:41
日時: 2013年04月02日 20:41
今日、初めて DJI NAZA F450 のGo Homeモードの自動帰還を体感して来ました。
ちょっと風が有りましたが、安定して戻ってくるし
着地地点精度も1M以内に入る精度に、クラブ員も驚いてました。
質問なんですが・・・
私は、クアッドの腹にバッテリーを積んでるので
機体をひっくり返して充電する方が楽なのですが・・・
GPSを搭載した為に、ひっくり返せなくなりました(涙
(今日は、外して充電しました。)
Q: GPSの架台無しで、フレームにGPSコンパスを直に付けたいと思いますが
この場合は、何に注意した方が良いですか?
先日は、VUからの電磁波が出てるの動画を見せてもらいましたがので
VUからは出来る限り離したいとは考えてます。
VUのLEDの色と点滅とかが正常に光ってる事を確認するだけで大丈夫でしょうか?
情報をお持ちでしたら、アドバイスをお願い致します。
投稿者: 敏ボー | 2013年04月14日 17:44
日時: 2013年04月14日 17:44
初めまして。
これまでにほとんど空物をやったことが無かったのですが、
クワッドが欲しくなり、3週間ほど前に台湾でNAZA M Liteと
機体など一式をショップのお勧すめの組み合わせで購入したhiroと申します。
教えてもらえる人もおらず、何がなんだか分らず、
英語の取説を読みながら格闘していましたが、
管理人様の翻訳して下さった日本語取説とこちらのページに助けられ、
本日、なんとか初フライトを終えることができました。
本当にありがとうございました。
初飛行は、最初いきなり転倒したものの、
一度浮いてしまえばかなりの安定感で、
GPSモードであれば、ビタッと止まり素晴らしかったのですが、
ちょっと舵を打った瞬間にハンチングして墜落してしまいました。
フレームの足が折れたものの、機体に大きなダメージは見受けられないのですが、
モーターが4個共に起動しなくなってしまいました。
もし、何か分ることがあれば、アドバイスをお願いできないでしょうか?
症状としましては、
1.送信機ON
2.機体の電源をON
3.機体のスタートアップOK
4.室内なので、LEDは赤、赤、赤、黄の繰り返し
5.CSCコマンドを送る
6.スロットルの上げていく
7.モーター回転せず・・・。
と、いった状況です。
本体とパソコンを接続して、
アシスタントソフトウェアで確認すると、
PCとの通信は正常で、
送信機からの信号は正しく伝わっているようです。
いきなりのお願いで申し訳ありませんが、
よろしくお願い致します。
投稿者: ありがとうございます。説明書読ませて頂きました。 | 2013年07月14日 22:25
日時: 2013年07月14日 22:25
●「ちょっと舵を打った瞬間にハンチングして墜落してしまいました。」
とのことですが、
BasicGainが高すぎると思います。
私もNAZA-M Liteを購入しました。
こちらのページで紹介させていただいております。私の場合はHEXなので、
クワッドの場合は、これより低い値になると思います。
http://wcnet.jp/lily/blog0/2013/06/fy550_nazam_lite_1.html
動画で、お分かりにくいかもしれませんが、
ゆっくり、ミソをするように揺れる場合は、ゲインが不足しております。
極端に低くすると、揺れが増幅して、墜落します。
小刻みに(ビン・ビンといったモーター音がして)揺れる場合は、ゲインが高すぎます。
これも、極端に高くすると、揺れが増幅して、墜落します。
私の調整方法は、エルロンまたはエレベーターを、いっぱい倒し、その後、ニュートラルに、
そのとき、機体が1~2回、小刻みに揺れて(ハンチング)止まるくらいにしております。
Attitude Gain の加減も Basic Gain と同様な現象が見られます。
● 5.CSCコマンドを送る 6.スロットルの上げていく
との説明ですが、CSCコマンドで、モーターは、一旦始動するのでしょうか?
●「赤、赤、赤、黄の繰り返し」は異常です。
屋内外を問わず、(安全のため)モーターが回転しないように設計されています、
(考えられれること)
・TXモニターで、ニュートラル時に、緑カーソルになっていますでしょうか?
・IMUキャリブレーションを、もう一度行ってみてください。
・屋外で、コンパスの校正を行ってみてください。
・IOCを使用しない設定にし、屋外(飛行場)にて、ノーマルモードで、LEDを観察してみてください。
緑LEDが4回点滅したら、飛行準備完了です。その後、たまに赤が点滅するくらいなら飛行可能です。
LEDが赤、赤、赤、黄の繰り返しとなった場合、バッテリーを抜き、再度接続する。を数回繰り返してみてください。
それでも、直らない場合は、ハードウェア不良が考えられます。
GPS Atti.モードに切り替えて飛行させてみてください。
ノーマルモードでの飛行はヘリコプターと同様になります。スティックをニュートラルに戻しても、
機体は、その姿勢を維持します。
NAZAシリーズは、拡張機能の有無のみで、基本的には同じように思われます。GPSコンパスモジュールはNAZAシリーズ全て同一です。
投稿者: まーぴー | 2013年07月15日 10:09
日時: 2013年07月15日 10:09
追伸
もし、Infinity Hobbyさんで購入されたのであれば、メールにて親切に対応してくれます。(日本語でok)
投稿者: まーぴー | 2013年07月15日 10:16
日時: 2013年07月15日 10:16
まーぴーさん
丁寧に説明して頂きましてありがとうございます。
落とした後に動画を拝見しました(泣)
もう少し良く拝見してから飛ばせば良かったですね。
おっしゃる通りBasicGainが高いのだと思いますので、
機体が復活したら値を下げて気を付けて調整します。
>● 5.CSCコマンドを送る 6.スロットルの上げていく
> との説明ですが、CSCコマンドで、モーターは、一旦始動するのでしょうか?
私の機体は、初フライトの際にCSCコマンドの後、モーターはそのままでは回転しませんでした。
そこからスロットルを上げると3つのモーターが回り始め、1つのモーターの回転の開始が遅かったです。
Atti.モードでしたが、通常のヘリのように傾きを修正するようにコントロールすると、そのモーターも回り始め、
浮き上がったら安定してホバリングしました。
(通常はCSCコマンドの後、スロットルは最スローの位置でもローターはスタートするのでしょうか?)
その後、舵を入れたらハンチングして墜落してしまったのですが、
その後はCSCコマンドのあと、全くモーターは始動しなくなりました。
ここまで読んで頂いてからで申し訳ありませんが、
頂いたアドバイスに従ってチェックを行ったところ、
IMUキャリブレーションでエラーが発生することが分りました。
「IMU works abnormally, please contact us or agents.」と表示されます。
Accelerationの値が大きいので、おそらくジャイロが破損したのではないでしょうか?
Infinity Hobbyで購入しておりますので、メールで問い合わせてみます。
ありがとうございます。
ひとつ確認で教えて頂きたいのですが、
>●「赤、赤、赤、黄の繰り返し」は異常です。
> 屋内外を問わず、(安全のため)モーターが回転しないように設計されています、
これはAtti.モードで、GPSが衛星の補足数が5個より少ないというサインだと思うのですが、
この場合にはモーターは回転しないものでしょうか?
以前、室内でモーターの回転方向を確認した際には、モーターが回っていました。
これは異常だったのでしょうか?
明日から中国へ出張します。
もし、こちらのブログに接続出来ず、確認が遅れましたら申し訳ありません。
投稿者: hiro | 2013年07月15日 20:49
日時: 2013年07月15日 20:49
Q.通常はCSCコマンドの後、スロットルは最スローの位置でもローターはスタートするのでしょうか?
A.IMMモードでは、スロットルを上げないと始動しません。Intelligentモードでは、CSCコマンド後、アイドリング状態になります。その後5秒以内にスロットルを上げないと自動で停止します。
私は、Intelligentモードを使用しています。安全面で、Intelligentモードをお勧めします。
Q.「赤、赤、赤、黄の繰り返し」は?
A. 私の受け取り方が間違っていました。そうですね、ゆっくり繰り返す場合は、赤はGPS、黄はAtti.モードを意味します。ですので、Normalモード時は、赤のみになるはずです。
当ブログの「NAZA関連」⇒「DJI NAZA-Mのアップデート(v2.02⇒v3.10)」の
「9. 異常なLED表示の意味とトラブルシューティング」 をご覧ください。説明書では、理解しにくかったので作成しました。
(補足)
各ESCのキャリブレーション(エンドポイント)はOKでしょうか?
(おそらくFlyFunをお使いだと思いますが)
工場出荷時のままでOKだとは思いますが、個々に、サーボテスターや受信機に直接繋いで、チェックもしくは再設定されることをお勧めします。
FlyFunの場合
1.送信機の電源を入れ、スロットルスティックをハイポジションに移動します。
2.ESCにバッテリーを接続し、約2秒待ちます。
3.“ビービー”と音が鳴れば、スロットルレンジの最大値は正常です。
4.(♪ソラシドレにならないうちに)スロットルスティックをローポジションに移動します。バッテリーのセル数だけ”ビー”と音が鳴ります。
6.最後に長い“ビーーー”という音が鳴れば、完了です。
(その他)
中国へ出張ですか。ラジコン関連で、良い商品などの情報がありましたら、教えてください。
今現在、探しているものは、TMF製AQ-50D(マルチローターコントローラー)用のHD-101(気圧センサー)です。
こちらのページをご参照願います。タグが使えないので、すいませんが、コピー&ペーストしてください。
http://sjprs.myweb.hinet.net/tmf.htm
お気を付けてお出かけください。
投稿者: まーぴー | 2013年07月15日 21:55
日時: 2013年07月15日 21:55
追伸
念のため、私のメールアドレスを書いておきます。
マサヒロ@wcnet.jp
マサヒロはローマ字で、「エム・エー・エス・エー・エイチ・アイ・アール・オー」としてください。
投稿者: まーぴー | 2013年07月15日 22:06
日時: 2013年07月15日 22:06
まーぴーさん
早速の返信ありがとうございます。
まだ日本におります。
モータースタートの件ですが、
私の記憶ではまーぴーさんの設定を真似させて頂いたと思っておりましたので、
Intelligentモードだと思い込んでおりました。
帰国したら確認してみます。
「9. 異常なLED表示の意味とトラブルシューティング」
ありがとうございます。拝見させて頂きます。
>各ESCのキャリブレーション(エンドポイント)はOKでしょうか?
> (おそらくFlyFunをお使いだと思いますが)
まさにその通りです。
私の機体が見えてらっしゃるようですね。
私の場合には最初にESCを一つずつ受信機につないで、
キャリブレーションしました。
この時に、通常のスロットル以外のチャンネルに接続し、
ハイポイントは問題無かったと思うのですが、
>4.(♪ソラシドレにならないうちに)スロットルスティックをローポジションに移動します。バッテリーのセル数だけ”ビー”と音が鳴ります。
ローポジションは、スティクの中心位置で設定してしまいました。
私はフタバの送信機なので、1520msecに設定したつもりです。
(説明書にはニュートラルが1520msecのESCを使用してくださいとあったような気がします。)
もしかすると、スロットルを目一杯スローにした位置にセットしなければならなかったでしょうか?
これがアイドリングしない理由かもしれません。
本当は出張に行かないで、いろいろ設定を試したいところです・・・。
今回の出張では深セン、香港方面へ行きますので、
模型屋さんを訪れたら、
TMF製AQ-50D(マルチローターコントローラー)用のHD-101(気圧センサー)を探してみます。
メールアドレスを教えて頂きましてありがとうございます。
後程メールさせて頂きます。
P.S
IMUの不調は早速Infinity Hobbyさんへ相談しました。
日本語を話せるスタッフの方は、非常に日本が上手ですよね。
先月購入したことを覚えてくれていると嬉しいのですが。
こちらも進展ありましたらご報告致します。
投稿者: hiro | 2013年07月15日 22:58
日時: 2013年07月15日 22:58
hiroさんへ
ESCのLow側は、必ずスティック最低で設定してください。ニュートラルではだめです!!!
FUTABAのパルス幅で言いますと、±100%で、1520μs±400μs、つまり、1120μs~1920μsとなります。
また、FUTABAの受信機のスロットルチャンネルに直接ESCを接続する場合は、必ずリバース設定してください。
他のSWチャンネルを使われたとのことでしたので、この点は問題ないと思います。
念のために、Low側が1120μsで、High側が1920μsとなります。
TMFの件よろしくお願いいたします。Infinityでも扱っていないようで・・・・
投稿者: まーぴー | 2013年07月15日 23:33
日時: 2013年07月15日 23:33
まーぴーさん
返信ありがとうございます。
ESCの設定を完全に間違えていたようですね。
先ほどメールを
マサヒロ@wcnet.jp
宛に送ろうとしたのですが、
wcnet.jpの部分が弾かれるようです。
送信がiPhoneからだからかもしれませんが、
ご確認頂けますでしょうか?
マサヒロの部分はローマ字に置き換えています。
よろしくお願いします。
投稿者: hiro | 2013年07月16日 06:47
日時: 2013年07月16日 06:47
アットマーク以降は半角文字でしょうか?(そのままコピーでは不可です)
ドメイン名は、大文字、小文字の区別はありません。
@wcnet.jpでだめなら
@asahinet.jp でお願いします。ユーザー名は同じです。
お手数をおかけします。
投稿者: まーぴー | 2013年07月16日 09:45
日時: 2013年07月16日 09:45
まーぴーさん
お久しぶりです。
仕事がやっと休みになりまして、
私のクワッドをやっと修理することができました。
先ほどテスト飛行を行い、
こちらで説明して頂いている手順で基本セッティングを終えることができました。
色々とありがとうございました。
ESCのセッティングを修正したら、モーターは正常に動作するようになりました。
離陸時にAtti.モードで機体を上げますが、
多少コントロールしないと、傾いてペラが地面を叩いてしまいます。
セッティングを詰めれば改善するものでしょうか?
色々試したいことが満載ですので、
この休みに一つずつ試してみたいと思います。
投稿者: hiro | 2013年08月12日 11:30
日時: 2013年08月12日 11:30
hiroさん、こんにちは
暑い日が続きますね。昨日、クラブの飛行場の草取りがあり、ついでに、空撮をしてきました。
ビデオカメラを新しく購入したので、そのテストをしたのですが、家で見たら、白とび? ハレーション?
露出が高すぎて、さっぱりだめでした。少しカメラの勉強もしないとだめですね(笑)
今まで、全てオートでやってました。でも、オートも使い方があるようで、先ほど、パナソニックのサポートを受けました。
NAZAですが、最新のファームウェアでは、GPS Atti.で離陸して、問題ないです。むしろ、こちらの方が安全でしょう。
私が、購入したNAZA-M Liteでは、高度が不安定で、離陸時、着陸時ともに、良くないです。
ゴー・ホーム後の、自動ランディングでは、バウンドしてしまいます。
NAZA-MやNAZA-M V2と、差をつけてますね。
投稿者: まーぴー | 2013年08月12日 13:00
日時: 2013年08月12日 13:00
まーぴーさん
こんにちは。
本当に暑い日が続きますね。
今日は実家の福山に戻って来ております。
新しいビデオカメラを購入されたみたいですね。
私の方はカメラを搭載する為に色々とテストを重ねています。
私もカメラが欲しいです♪
なかなか買えないので、とりあえず手持ちのiPhoneを乗せてみようかと。
カミさんのと2台あるので、
Facetimeを使えば飛んでいる様子を撮影&リアルタイムに見ることができるので、
iPhone用のジンバルユニットがあれば便利なんですけどね。
昨日、初めてのゴー・ホームのテストを行いました。
移動が結構高速だったので一瞬驚きましたが、
着地もワンバウンド程度で見事に着地することができました。
離陸もGPSモードの方が安定しているような気がします。
今日も日が落ちたら、河川敷でテスト飛行を楽しみたいと思います。
投稿者: hiro | 2013年08月14日 13:52
日時: 2013年08月14日 13:52
hiroさん、こんにちは
今まで、使っていたJVCのEverioは、静止画の保存が1920x1080で、物足りなかったので、Panasonic HC-V620Mを購入したのですが、空撮テストした結果、露出オーバー?白とび(ハレーション)が激しくて、ほとんど、真っ白で、まったくだめでした。カメラの知識が少ないので、Panasonicのサポートに電話して、いくつか方法を教えて頂いたので、試みます。また、撮影した画像を比べて、私の主観ではJVC製の方が好きですね。JVCのEverioは2万円強で、今回のPanasonicは4万円弱で購入しました。高価なので、どうにか使いこなせるよう努力しないといけないと思っています。どちらも「フルオート」で使っていますが、JVCの方が楽に使えます。
ところで、hiroさんは、NAZA-M V2 をお使いですよね?
投稿者: まーぴー | 2013年08月14日 18:34
日時: 2013年08月14日 18:34
まーぴーさん
こんばんは。
私のはNAZA-M Liteなんです。
だからここから先あまり拡張性はありません。
もう少し色々学んだらV2にしたいです。
今の所V2にすると何ができるのか良く分ってないですけど(笑)
今日はiPhoneで録画しながら飛ばしてみました。
テープでiPhoneを機体に貼りつけただけたったので、
振動でブレブレで駄目でした(爆)
ですので、いたって普通ですが、
Go ProにTAROTのジンバルを載せようかと思っています。
ただGo Proは値段が高いので、
まーぴーさんのように通常のビデオカメラを使いこなせたら、
そちらの方が他の用途にも使えるので良いように感じます。
JVCのブログの記事は少し拝見していますが、
綺麗に撮影出来ていると感じます。
今後のPanasonicの記事も楽しみにしています。
投稿者: hiro | 2013年08月14日 20:33
日時: 2013年08月14日 20:33
Go Pro は、定番で、日本の放送局でも採用されているようです。
Go Pro は、悪条件下での撮影に重点を置いて設計されているようです。
個人的には、広角は、好きではありません。
重たくなりますが、一眼レフで撮影するときれいみたいですね。
カメラは、ある程度、重たい方が、ブレがなくなります。
私の場合、(HEXですが)
カメラを搭載した、総重量が3kgを少し超えています。
バッテリー 3セル5100mAhを2本搭載して、約10分間の飛行が可能です。
私は、いつも95%充電しています。100%充電時と比べて、充電時間も短縮され、また、バッテリーの寿命も長いみたいです。
投稿者: まーぴー | 2013年08月14日 22:41
日時: 2013年08月14日 22:41
まーぴーさん
そうですね、確かにGoProは広角ですね。
一眼レフは私の機体ではちょっと浮かないと思います。
まーぴーさんの機体は、
3セルで5100mAhで2本というのは、
並列に接続ということですよね?
私は今の所4セルで6400mAhです。
カメラを積んでいないので飛行時間は18分程度です。
充電は充電器任せです。
カット電圧を変更できると思うので調べてみたいと思います。
GPSでの離陸は結構調子が良いのですが、
離陸してから数分間、どうも左に流れます。
その後はピタっと止まるのですが、ちょっと原因が分りません。
私は操縦自体がへたっぴなので、
今日も日が落ちたら練習しようと思います。
最近AR DroneにもGPSユニットが発売されたので、
こちらも一緒に飛ばしています。
こちらは家の周りでも遊べるのでこれはこれで便利です。
良く出来たおもちゃです。
投稿者: hiro | 2013年08月15日 12:49
日時: 2013年08月15日 12:49
hiroさん、こんにちは、
暑い日が続きますね。日中は、外出できませんね。
3セルで5100mAhを2本並列に接続しています。
容量(Wh)では、hiroさんの約1.2倍で、大差はないですね。
近い将来は、モーターのKV値を1/2にし、直列で6S仕様にしようと考えています。
現在、1つのモーターのベアリングが摩耗しています。
Infinity Hobbyで、安物(当時1000円位)のものを購入して、在庫が10個ほどあるので・・・。
私の場合、離陸直後は、自分の方へ寄ってきます。なぜか、機首を横に向けても、自分の方へ寄ってきます。数分後には、落ち着きます。
ただ今、カメラマウントの製作中です。カメラのサイズが大きくなり、防振台(高さ13mm)を取り除いたのですが、撮影後の画像を見たら、機体高度を変化させたとき、画像が震えているのがわかったので、大幅に変更中です。
今度は、カメラの重心位置は、前後だけでなく、上下の重心位置も考慮しました。
先ほど、図面が完了しました。
HyperionのEOSシリーズ充電器では、TCS CAPACITY という項目で変更できます。
他の充電器は、使ったことがないので、わかりません。
投稿者: まーぴー | 2013年08月15日 16:34
日時: 2013年08月15日 16:34
まーぴーさん
こんばんは。
今朝、神奈川に戻ってきました。
直列で6S、かなりパワフルなイメージですね!!
私は今はバッテリーを抱え込みで搭載しているのですが、
もし、ジンバルを取り付けるのであれば、
バッテリーは機体上部に搭載するしか方法は無いですよね?
その場合には2本のバッテリーを振り分けて搭載しないと、
1本のままだと重心が高くなってしまう感じがしています。
しかしどうしてもバッテリーを1本のままで搭載するとなると、
(手持ちのバッテリーの都合もあるので・・・。)
MCは機体の中心からズラして搭載しなければなりません。
これは飛びに悪影響があるでしょうか?
それから、
Verticalゲインの調整なのですが、
先日までは水平方向へ全速で移動している際に高度が下がって行く傾向にあったのですが、
このゲインを強くしたら、高度を綺麗に維持したまま移動するようになりました。
しかし、停止動作の際にはまだ結構高度が下がります。
Basic Gainは自立安定の調整ということなのですね。
少しずつ各パラメーターの効きが理解できてきました。
新しいカメラマウントのが出来たら是非ブログで紹介してください。
楽しみにしています!
投稿者: hiro | 2013年08月17日 21:16
日時: 2013年08月17日 21:16
hiroさん、こんばんは
NAZAのマニュアルには、重心の垂直線上にMCを設置しなさい。と書かれていますが、
DJIのサイトを見たら、フレームの端の方にインストールしているクワッドの例がありました。
MCの中のセンサーは、水平を見るジャイロ、加速度センサー、気圧センサー、なので、重心から、ずれても良いような気がします。
ヘリコプターの場合も、ジャイロはマストの直下に取り付けるのが理想ですが、
実際は、後部または前部に取り付けていますよね。それと、同じじゃないでしょうか!?
GPS/コンパスユニットは、専用取付キットを使わずに、フレームに取り付けてもOKでした。
ラダーをいれたとき、上下の変動がでませんか? これが、一番気になります。
私の場合はHEXで、総重量が1400g程度ですけど
Basic Gain
Roll Pitch Yaw Vertical
180 180 100 150
Attitude Gain
Roll Pitch
90 90
としています。
新しいカメラマウント、といっても、機構は今までのものと同じです。
ジンバル用サーボが非力なので、カメラの前後方向および上下方向の重心位置を考慮しました。
では、また
投稿者: まーぴー | 2013年08月17日 22:28
日時: 2013年08月17日 22:28
まーぴーさん
こんばんは。
今はMCのは機体の中心に載せていますので、
ラダーを入れても機体の上下の動きはほぼありません。
しかし、機体の中心を軸にして回転せず、
前の片側のローターを中心に回転します。
重量は量っていないのですが、
Basic Gain
Roll Pitch Yaw Vertical
70 70 50 120
Attitude Gain
Roll Pitch
100 100
という感じです。
下降時に風にあおられると、
揺れが大きくなる場合があるので、
Basic GainのRollとPitchはもう少し落として、
Verticalはもう少し上げてテストしたいと思います。
私のカメラ用ジンバルは、
GoPro用のTarotのブラシレスを狙っていますが、
これはNAZAではコントロールできないので、
別途ジャイロとコントローラーが必要なようです。
カメラも結構なお値段なのでもう少し悩みます。
投稿者: hiro | 2013年08月20日 23:30
日時: 2013年08月20日 23:30
hiroさん
こんばんは
以下は、私の経験上のことですが、
機体が軽い、または、重心が比較的上にある場合は
Basic Gain を上げるとハンチングします。
しかし、Attitude Gain に影響します。 本来、Attitude Gain は、操作量に作用するものですが、機体が軽い場合は、
Attitude Gain を下げて、Basic Gain を上げてみてはいかがでしょう。
(例)
Basic Gain
Roll Pitch Yaw Vertical
120 120 70 120
Attitude Gain
Roll Pitch
70 70
程度でテストしてみてはいかがでしょう。
ジンバルは、ブラシレスサーボですか。いいですね。
ジンバル専用ジャイロをお勧めします。
私は、NAZAのジンバル制御を使っており、しかも通常サーボで、ロッドリンケージです。
したがって、直線的に動きませんので、適当なところで、妥協しています。
ジンバルにジャイロを搭載して、制御するのが理想です。
NAZAのジンバル制御は、ギクシャクした動きで、滑らかでありません。
デジタルサーボを使用し、400Hzにしたら、少し、良くなりましたが。
お互いに、いろいろ試みてみて、情報交換しましょう。
よろしくお願いいたします。
投稿者: まーぴー | 2013年08月20日 23:58
日時: 2013年08月20日 23:58
hiroさん
おはようございます。
追伸ですが、
「前の片側のローターを中心に回転します。」
とのことですが、GPS Atti.とAtti.モード双方共でしょうか?
投稿者: まーぴー | 2013年08月21日 06:18
日時: 2013年08月21日 06:18
まーぴーさん
こんばんは。
お盆を過ぎてもまだまだ暑いですね。
アドバイスありがとうございます。
神奈川に戻ってくると、
なかなか飛ばせる場所が無いので、
会社の屋上で離陸させようとしたら、
風が強くてあっさりひっくり返りました(笑)
どうも最初の離陸が難しいです。
2回目は何もしなくても浮くんですけどね・・・。
次回はGainの調整をアドバイスを頂いた方向で試してみます。
NAZAのジンバル制御はそんなに優秀では無いのですね。
私はまだGoProの購入に踏み切れていません(笑)
楽しみながら悩みたいと思います。
>「前の片側のローターを中心に回転します。」
>とのことですが、GPS Atti.とAtti.モード双方共でしょうか?
これは両方のモードで同じ状態だと思います。
機体の上からみて、時計周りに回転するときには、
右前のローターを中心にして回ります。
でも、Gainを変えたら変化があるかもしれません。
まーぴーさんと色々情報交換させて頂いて非常に楽しいです。
引き続きよろしくお願いします。
投稿者: hiro | 2013年08月22日 00:05
日時: 2013年08月22日 00:05
hiroさん、
おはようございます。
残暑お見舞い申し上げます。 本当に、暑い日々が続きます。
今、午前7時すぎなのに、外気温度は30℃あります。日中は、とても外の作業はできません。
ラダーを操作した場合
私の場合、前の片側のローターを中心に回転することはありません。
しかし、ラダーを左右いっぱいに操作したとき、上下変動が激しいです。
電源投入後、NAZAが安定に動作するまでには、1分以上かかりそうですね。
GPS Atti.モードで離陸するとき、アズル? ドリフトする? ことがあります。
おそらく、NAZA自身が、取得している現在位置と機体の位置とが異なるっていると判断し、
そちらへ移動しようとするのでしょう。
その場合、Atti.モードで離陸し、浮いてからGPS Atti.モードに切り替えるとよいでしょう。
基本的に、ジンバル用ジャイロは、マウント装着しますが、
NAZAの場合は、機体に装着されていますので、フィードバック制御になりません。
機体を傾けてみて、水平を維持するよう、ゲイン(サーボへの制御量)を調整する必要があります。
制御量が大きすぎた場合、傾けた方向にジンバルが傾き過ぎ、水平になりません。
本当にアバウトなモノです。
TAROTのGoPro用ブラシレスジンバル、購入したら、使用感などお聞かせください。
では、また (^.^)
投稿者: まーぴー | 2013年08月22日 07:47
日時: 2013年08月22日 07:47
まーぴーさん
こんにちは。
今日は久々に飛ばすことができました。
本日のセッティングはこちらです。
Basic Gain
Roll Pitch Yaw Vertical
120 120 70 120
Attitude Gain
Roll Pitch
70 70
Basic Gainを上げたのですが、
RollとPitch方向の位置決めが弱くなったように感じました。
ラダーを操作したときには、
機体の中心を中心として綺麗に回転するようになりました。
回転時の高度変化はほとんどありません。
エルロンを目一杯に操作して、綺麗に水平には飛行しますが、
一定速度になったあとに停止モードに入ると高度が5m近く落ちる場合があります。
これをもう少し抑えたいです。
下降時の揺れに対する制御はこちらの方が良いようです。
Attitude Gainは
送信機から操作していない場合の自動制御にも影響しているのでしょうか?
自分が思っていた動きよりは全体的にルーズになったようでした。
機体の重さを量ってみたのですが、
現状ではカメラがありませんので2030gです。
TAROTのブラシレスジンバルは、
給料を貰ったのでそろそろ購入に踏み切れそうです(笑)
投稿者: hiro | 2013年08月24日 14:16
日時: 2013年08月24日 14:16
hiroさん、
こんにちは、レポートいただき、ありがとうございます。
各ゲインは、重量と重心位置に左右されるようです。
カメラジンバルを機体下に取り付けると、重量増加、低重心になるので、
Basic Gain は、全て、今より高く設定できると思います。
Attitude Gainは、基本的には(説明書によれば)、操作量の調整です。
しかし、機体重量が軽い(1500g以下)だと、Basic Gain に影響しました。
TAROTのブラシレスジンバルのレポート、楽しみにしています。(^o^)
投稿者: まーぴー | 2013年08月24日 15:25
日時: 2013年08月24日 15:25
まーぴーさん
こんばんは。
ご無沙汰しております。
前回の書き込み以降仕事が立て込んでいて飛ばせてないのですが、
TAROTのジンバルユニットとジャイロ、そしてGoRroが手元に届きました。
GoProは4Kを活かせる機器を持っていませんし、
シルバーエディションのみ外部電源に対応しているということでこちらを購入しました。
この後は、バッテリーをフレーム上部に搭載できるようにメカデッキをデザインして、
カーボン材を小さいマシニングで切り出したいと思っています。
飛ぶのはもうちょっと先になりそうです。
地道に進行しておりますので、まだ書き込みます。
投稿者: hiro | 2013年09月08日 22:11
日時: 2013年09月08日 22:11
hiroさん、こんばんは
私は、全て、動力用バッテリーから供給しています。
工作機械があるといいですね。 私は、全て鋸、ボール盤、ヤスリで手作業です。
楽しみがいいですね。また、報告してくださいね。
投稿者: まーぴー | 2013年09月08日 23:31
日時: 2013年09月08日 23:31
当サイトを初めて拝見させて頂きました。
F550を所有しております。
当方は、起動時に、緑4回、赤点滅の連続という症状が出ております。
どういう意味なのでしょうか?
投稿者: みきお | 2013年10月16日 21:01
日時: 2013年10月16日 21:01
みきお さん
はじめまして、
IMUキャリブレーションを、やり直してみてください。アドバンストからやり直すとよいでしょう。
途中で、進捗バーが進まなくなったら、一度、電源をoffして、10分ほど待って、再開してください。
アプリは起動したままで、結構です。
成功したら、
コンパスのキャリブレーションを行ってください。
また、何かありましたら、お気軽に、ご質問ください。
投稿者: まーぴー | 2013年10月16日 21:30
日時: 2013年10月16日 21:30
改善しました。ありがとうございます。
また、質問させて下さい。
投稿者: みきお | 2013年10月18日 23:58
日時: 2013年10月18日 23:58
初めまして、ここで質問させていただいてよろしいのでしょうか?
今回、F550 NAZA M Liteで初フライトをしたのですが、Attiモードの時のフライトで
エレベーターとエルロンのトリムが合ってなかったので送信機のトリムを合わせよう
としたのですが変化はありませんでした。
トリムの合わせ方をご教示いただけましたら幸いです。
投稿者: ハル | 2014年04月23日 20:43
日時: 2014年04月23日 20:43
初めまして、ここで質問させていただいてよろしいのでしょうか?
今回、F550 NAZA M Liteで初フライトをしたのですが、Attiモードの時のフライトで
エレベーターとエルロンのトリムが合ってなかったので送信機のトリムを合わせよう
としたのですが変化はありませんでした。
トリムの合わせ方をご教示いただけましたら幸いです。
投稿者: ハル | 2014年04月23日 20:43
日時: 2014年04月23日 20:43
ハルさん、こんばんは
Attiモードの時では、機体を水平に保ちます。風が吹けば、風下に流れます。
もし、水平でないようであれば、
・TXキャリブレーションを行ってください。
・IMUキャリブレーションを行ってみてください。
投稿者: まーぴー | 2014年04月23日 23:05
日時: 2014年04月23日 23:05
はじめまして。
NAZA-Mの設定で検索し、こちらのページにたどり着きました。
NAZA-M Liteの日本語マニュアルが大変参考になり、セッティング作業が難なく行なえました。
解説内容がとてもわかりやすく丁寧なので、今後も参考にさせていただきます。
投稿者: boon | 2014年06月18日 22:48
日時: 2014年06月18日 22:48
boonさん、おはようございます。
お役にたてて、光栄です。
作製したマニュアルは古いですが、基本的には同じです。
また、NAZA-M LiteのアシスタントソフトウェアもNAZA-Mと同様なインターフェイスになりました。
マニュアルを新しくすればよいのですが、なかなか、当時のような気力がわきません。
原本(英語)のマニュアルも、分かりやすいとは思いません。
私の作った日本語マニュアルは、できるだけ原本に忠実に作成しました。
近いうちに、暇を見つけて、私の経験を加えた、独自のマニュアルを作成したいと思っております。
ご訪問、ありがとうございました。
これからも、よろしくお願いいたします。
投稿者: まーぴー | 2014年06月19日 01:14
日時: 2014年06月19日 01:14
はじめまして、滋賀のムーといいます。
今年の6月に、あるイベントでマルチコプターの空撮風景をみて、どうしてもやってみたくなりこの6月にHEXAコプターキットと電子部品を購入してしまいました。
予算の都合で、中国製の商品(ARRIS M680とNAZA M V2+GPSのセット)を通販で購入したのですが、取説等一切なく、ネットでさがしていたら、このページにたどり着きました。NAZAのマニュアルが大変参考になり、一通り組み上げました。約1ヶ月あまりかけて、やっと初飛行にこぎつけ、なんとか上げることができました。
10フライトほどして、電気配線のチェックをしたところ数箇所、ハンダつけ部分がイモになっており、一度全体を分解して再配線、組み立て直しをしましたが、いままで飛行できていたはずなのに、モーターが回転しなくなってしまいました。
手順通り送信機から順に電源を入れると、REDは赤、緑、黄の後緑数回の点滅でセルフチェクに入りますが、CSC操作しスロットルをアップするも反応してくれません。
モードはIntelligentモードです。この状態で様子を見てみますと、ESCからピッ、ピッ、・・・と断続的なビープ音がなっています。
ESCとモーターのチェックを受信機直結で行ったところ、このブログ内で記述されていたとおり電源投入後のスティック・アップで短いビープ音2回の後スティックダウンで6回(6sLipo)のビープの後長いビープ音で、全てのESCとモーターでキャリブレーションもできました。
あとは配線間違い(ARRISは配電盤等はなくすべてのESCケーブルをまとめてハンダ付けしてコネクターに集約する形ですので、たいへんごちゃごちゃします)の可能性もあるので、PMUからの5Vの給電確認、アシスタントソフトウエアによる設定の確認を行いましたが、特に異常は感じられませんでした。(IMUのキャリブレーションもbasic,advanceの両方やり、時間はかかりましたがグリーンのチェックマークが出ましたので問題はないように思います)
LEDの表示も、室内ですので赤3つ(ノーマルモード)、黄、赤3つ(Attiモード)、緑赤3つ(GPSモード)で正常に作動しているように思うのですがいかがでしょうか。
最終考えられることはメインコントローラーの損傷かなとは思うのですが、どのようにチェックしたらよいのかわかりません。
ブログの他の記事を見ていましたら、電子機器に関してかなり詳しいように感じましたので、思いきってご相談申し上げた次第です。
何か原因究明のヒントを頂ければ嬉しいです。
投稿者: ムー | 2014年08月12日 12:25
日時: 2014年08月12日 12:25
はじめまして、滋賀のムーといいます。
今年の6月に、あるイベントでマルチコプターの空撮風景をみて、どうしてもやってみたくなりこの6月にHEXAコプターキットと電子部品を購入してしまいました。
予算の都合で、中国製の商品(ARRIS M680とNAZA M V2+GPSのセット)を通販で購入したのですが、取説等一切なく、ネットでさがしていたら、このページにたどり着きました。NAZAのマニュアルが大変参考になり、一通り組み上げました。約1ヶ月あまりかけて、やっと初飛行にこぎつけ、なんとか上げることができました。
10フライトほどして、電気配線のチェックをしたところ数箇所、ハンダつけ部分がイモになっており、一度全体を分解して再配線、組み立て直しをしましたが、いままで飛行できていたはずなのに、モーターが回転しなくなってしまいました。
手順通り送信機から順に電源を入れると、REDは赤、緑、黄の後緑数回の点滅でセルフチェクに入りますが、CSC操作しスロットルをアップするも反応してくれません。
モードはIntelligentモードです。この状態で様子を見てみますと、ESCからピッ、ピッ、・・・と断続的なビープ音がなっています。
ESCとモーターのチェックを受信機直結で行ったところ、このブログ内で記述されていたとおり電源投入後のスティック・アップで短いビープ音2回の後スティックダウンで6回(6sLipo)のビープの後長いビープ音で、全てのESCとモーターでキャリブレーションもできました。
あとは配線間違い(ARRISは配電盤等はなくすべてのESCケーブルをまとめてハンダ付けしてコネクターに集約する形ですので、たいへんごちゃごちゃします)の可能性もあるので、PMUからの5Vの給電確認、アシスタントソフトウエアによる設定の確認を行いましたが、特に異常は感じられませんでした。(IMUのキャリブレーションもbasic,advanceの両方やり、時間はかかりましたがグリーンのチェックマークが出ましたので問題はないように思います)
LEDの表示も、室内ですので赤3つ(ノーマルモード)、黄、赤3つ(Attiモード)、緑赤3つ(GPSモード)で正常に作動しているように思うのですがいかがでしょうか。
最終考えられることはメインコントローラーの損傷かなとは思うのですが、どのようにチェックしたらよいのかわかりません。
ブログの他の記事を見ていましたら、電子機器に関してかなり詳しいように感じましたので、思いきってご相談申し上げた次第です。
何か原因究明のヒントを頂ければ嬉しいです。
投稿者: ムー | 2014年08月12日 12:26
日時: 2014年08月12日 12:26
ムーさん、こんばんは
ご返事が遅くなりまして申し訳ございません。
考えられることを書きます。おそらく、ほとんどチェック済みだとは思いますが・・・
ESCのキャリブレーション・・OK
とのことですので、
・アシスタントソフトウェアのTXキャリブレーションを確認してみてください。
スロットルスティック上で、カーソル右ならOKです。
他の舵については、右は右、上は右、ならOKです。
投稿者: まーぴー | 2014年08月13日 21:16
日時: 2014年08月13日 21:16
はじめまして!!質問です、機体はDJI F550でNaza m liteを を搭載しています、何度かフライトしていますが左に流れる癖が有りますキャリブレーションなどやモーター、アンプの入れ替え等もしてみたのですが症状は変わりません、フライトして一時するとか正常に戻ります、フライト開始から一定時間左に流れてしまいます、改善の予知は有りますか!?又トリムをニュートラルにしてるのですが、点滅がGPS Attiモード場合緑LEDが二回点滅します、説明書ではトリムがニュートラルになってないシグナルと記載が有りました、何か分かればアドバイスを宜しくお願いします。
投稿者: 澁谷 真澄 | 2014年08月18日 10:01
日時: 2014年08月18日 10:01
はじめまして!!質問です、機体はDJI F550でNaza m liteを を搭載しています、何度かフライトしていますが左に流れる癖が有りますキャリブレーションなどやモーター、アンプの入れ替え等もしてみたのですが症状は変わりません、フライトして一時するとか正常に戻ります、フライト開始から一定時間左に流れてしまいます、改善の予知は有りますか!?又トリムをニュートラルにしてるのですが、点滅がGPS Attiモード場合緑LEDが二回点滅します、説明書ではトリムがニュートラルになってないシグナルと記載が有りました、何か分かればアドバイスを宜しくお願いします。
投稿者: 澁谷 真澄 | 2014年08月18日 10:03
日時: 2014年08月18日 10:03
渋谷さん、
こんばんは、返事が遅くなってすいません。
私も、NAZA-M Liteを使っていますが、同じ症状です。
しばらくは、位置が定まりません。 離陸時、スロットルを上げると、いきなり傾いてしまう。
また、低スキッドの場合、着陸時にバウンドします。スキッド高は、最低10cm位必要です。
これらは、NAZA-M Liteの性能だと思ってあきらめています。
NAZA-M(V2ファームウェア)やNAZA-M V2では、安定します。
NAZA-M Liteは廉価版ということでしょうね。
ハードウェア的には、同じかもしれませんが、ソフトウェア的に、意図的に機能を削減し、性能を落としているのかもしれませんね。
トリムの件ですが、
TXキャリブレーション後、
飛行時のトリム操作は一時的なものです。(エルロン、エレベーター、ラダーにおいて)
MCが起動するときにニュートラルを記憶します。
つまり、MCが再起動したとき、トリム偏移した点を新たなニュートラルとして記憶します。
D/Rは有効です。
私は、ラダーのみD/Rを使って10~20%位にしています。(空撮目的)
ただし、D/Rを100%に戻さないと、CSC操作できませんので注意!
プロポ(送信機)の設定について、
エンドポイント(トラベル量)は100%
サブトリム、トリム共にゼロ
FUTABAの場合、スロットルchのみリバース
として、TXキャリブレーションを行います。
※リバース設定は、送信機でもアシスタントソフトウェアでもできます。
FUTABAだけが異例なので、(もし、FUTABAの送信機をお使いの場合)
スロットルchのみ送信機でリバースすることをお勧めします。
GPS Atti.モードでは、緑点滅 ( ・・ ・・ ・・ ・・ ・・ )で、正常です。
Atti.モードでは、同じ点滅パターンで、黄色(オレンジ)です。
Normalモードでは。消灯
ただし、GPSの受信状態を意味する赤点滅が加わることがあります。
投稿者: まーぴー | 2014年08月18日 22:22
日時: 2014年08月18日 22:22
初めまして、長崎のま〜君と申します。
2点についてご教授お願いいたします。F550にNAZA V2、ジンバル・カメラ・FPV・OSDなど積んでいます。
機体を組み上げた状態で友人から最近購入し、ジンバル他を追加で組み上げフライトしています。
1点目の問題ですが、今まで(2ヶ月程)気になりませんでしたが3日前からI.O.C.に入れるといきなり上昇します。
スロットルで止めないと何処までも上昇を続けます。ホバリングさせ、I.O.C.をOFFすると今度は何処までも下降します。
スロットルワークでホバリングさせば安定して止りI.O.C.は正常動作します。
2点目は、GPSATTIモードでホバリング中、ラダーを当て回転させニュートラルに戻すとかなりの速度で右水平移動します。
成り行きに任すと移動が目視で5mから7m位で止まり、元の方向に少し戻ってホバリングします。
以上2点についてよろしくお願いいたします。
投稿者: ま〜君 | 2014年10月01日 13:23
日時: 2014年10月01日 13:23
ま~君 さん、こんばんは
友人から色々なトラブルはお聞きしておりますが、このような症状を耳にするのは初めてです。
私の考えるところを書かせていただきます。
コンパス回路(ロジック)に問題があると思います。 それが、ハードウェアかソフトウェアかは不明ですが・・・
・ジンバル他を追加後、コンパスのキャリブレーションは行いましたか? 必要です。
・コンパスのの近くに、磁石はありませんか?
・アシスタントソフトウェアにて、チェックしてみてください。コンパスの各値は、正常範囲に入っていますか?
私の過去記事です。1つでも参考になればと思います。
http://wcnet.jp/lily/blog0/2014/02/gps_2.html
http://wcnet.jp/lily/blog0/2014/02/gps_1.html
http://wcnet.jp/lily/blog0/2013/10/nazam_3.html
http://wcnet.jp/lily/blog0/2013/05/naza_2.html
適切な回答ができず、すいません。
投稿者: まーぴー | 2014年10月01日 23:55
日時: 2014年10月01日 23:55
まーぴーさん早速のお答えありがとうございます。
過去に投稿された記事を熟読させて頂き対応を考えてみたいと思います。
未熟者ですが、この症状については原因の切り分けが出来ず不安材料と成っています。繊細な飛行(狭い路地のような空間)は出来ないと思いますが、
大空を勝手気ままにフライトすることには問題ないように思います。勿論機体の悪い癖を承知してのことですが。
時間をかけて頑張ってみたいと思います。
今後ともよろしくお願いいたします。
投稿者: ま〜君 | 2014年10月02日 07:34
日時: 2014年10月02日 07:34
初めまして
NAZAのマニュアルと説明読ませて頂きました
ここのブログを見たことでワルケアにNAZAを積んで飛ばすことができました
ありがとうございます。
これからもブログ覗かせてもらいにきます
投稿者: butamaru69 | 2014年10月03日 20:18
日時: 2014年10月03日 20:18
ま~君さんへ
コンパスのキャリブレーション、ジャイロ、加速度センサーのキャリブレーション を行っても不具合がでる場合は、
ハードウェア不良の可能性が大きいので、販売店経由で、修理依頼されてみられたらと思います。
私の場合、Go home & Landing において、ホームポジション高度20mからは、手動で着陸させております。
では、何かございましたら、お気軽にコメントください。
butamaru669さん、はじめまして
お役に立てて光栄です。
NAZAのマニュアル作成には、結構時間を費やしました。できるだけ日本語らしく、それで、原文の意図を変えないよう言葉を選びました。まぁ~、翻訳は素人なので、完成度の低さはお許しください。
これからも、よろしくお願いいたします。
投稿者: まーぴー | 2014年10月03日 20:34
日時: 2014年10月03日 20:34
初めまして。静岡のmozuと申します。
初心者同様なので宜しくお願い致します。
早速ですが、DJI F550 NAZA-M LITE を購入し、組み付け後、設定、調整へと
進んでいます。送信機は、walkera devo8s、受信機は、devo RX1002を使用して
います。四苦八苦しながら、プロポの設定やNAZAの設定等をなんとか終了することが
できたのですが、GPSコンパスキャリブレーションの段階でつまずいています。
何度実施しても、キャリブレーションモードに入ることが出来ず困惑しています。
何か原因があると思うのですがわかりません。送信機の設定の仕方が悪いのか、NAZA
の設定が悪いのか。アドバイスをよろしくお願いいたします。
投稿者: mozu | 2014年11月13日 17:22
日時: 2014年11月13日 17:22
mozuさん、
ご返事が遅くなり、すいません。
ご質問内容を、「デジタルコンパスの校正ができない」と解釈して回答させていただきます。
キャリブレーションモードに入るには、制御モードスイッチをManual⇔GPS Atti.間を6~10回スライドします。
考えられる点は、
・アシスタントソフトウェアにて、Manual⇔GPS⇔GPS Atti.位置が、それぞれグリーンゾーンに入っているか、ご確認ください。
GPS位置は送信機のサブトリムで、Manual位置およびGPS Atti.位置はトラベル量を調整してください。
左右のEPA(エンド・ポイント・アジャスター)で行います。
・制御モードスイッチの切替る速さを加減してみてください。ゆっくりすぎるとキャリブレーションモードに入れません。
回数は6回以上で、LEDが黄色常時点灯します。
とりあえず、以上をお試しください。
問題解決できない場合、また、コメントに書き込みください。
投稿者: まーぴー | 2014年11月14日 23:09
日時: 2014年11月14日 23:09
初めまして、マルチコプターの初心者です、JRのXG8ですがアシスタントウェアでレバーに位置はほぼ0に出来ますが何回かフライトした後アシスタントウェアで確認すれば大きくずれています(50とか)プロポのエレベータートリムとかラダートリムスイッチに触っているのでしょうか、触っても数値が変わらないように無効にはできないでしょうか。
投稿者: toshi1006 | 2015年03月06日 05:47
日時: 2015年03月06日 05:47
tosi1006さん、
こんにちは、
プロポのニュートラルが変動しますか?
送受信機を通電し、しばらく(10~20分程度)様子をみてください。
変動が顕著であれば、購入店に相談しましょう。
変動量の50という数値はアシスタントソフトウェア上の値ですか?
そうであれば、
少し多いような気がしますが、パルス幅に換算すると20μsecですから、実用上、(ほとんど)問題ないと思いますが・・・。
NAZAは、初期化の際に、エルロン、エレベーター、ラダーのニュートラル位置を記憶します。
したがって、トリム操作は無効と考えてよいと思います。
NAZAは、FUTABA系(ニュートラル=1520μsec)のRC装置を前提にしているようです。
それに対し、JRはニュートラル=1500μsecです。
次のことをやってみてください。
変動した時点で、(アシスタントソフトウェアの表示をみながら)送信機にサブトリムで、ゼロに調整してみてください。
(アシスタントソフトウェアのキャリブレーションでは行わないで)
いかがでしょうか?
何かございましたら、ご連絡ください。
投稿者: まーぴー | 2015年03月06日 18:21
日時: 2015年03月06日 18:21
まーぴーさん
昨年10月に質問させていただいた静岡のmozuと申します。
半年ぶりの質問になりますが宜しくお願いします。
DJI F550 NAZA-M LITEを、futaba T10J(マルチコプター用)セルフニュートラル仕様に
取り替えてみました。アシスタントソフト上の設定も終わったのですが、アイドルスピードが異常に高回転で機体が浮上しそうな動きをしました。RECOMMANDから最LOWに変えても多少遅くなる程度であまり変わりません。何が原因なのかさっぱりです! ちなみに、S-BUSシステムは使わず通常のCH1~7を使用しています。MCのA E T RはCH1~4に通常どうり接続、Uポートは5CH
に、S/WはC。X2は6CHに、S/WはEに設定。7CHはリトラクトギヤーに、S/WはGに設定しています。
宜しくご指導お願いたします。
投稿者: mozu | 2015年04月03日 19:53
日時: 2015年04月03日 19:53
mozuさん、こんばんは
私は「futaba T10J」について、というか、Futabaのプロポは、過去に使ったことが無いので、よくわかりません。
もし、サーボ信号のパルス幅が測定できるものをお持ちでしたら、測定して見られたらと思います。
私は、オシロスコープで見ています。
他に、受信機からの信号のパルス幅が測定できるサーボテスターもあります。
とりあえず、次の点をご確認ください。
・futaba T10Jにおいて、機体モードを「マルチコプター」ではなく、「飛行機モード」にしては、どうですか?
・送信機のメニューの中に、サーボモニターがあると思います。ここで、スロットルを上下させてみて、
他のチャネル(たとえばエルロンなど)と同じだけのストロークがありますか?
・今までのFutabaのプロポは、スロットルのみリバースでした。マルチコプターモードでは、どうですか?
・ESCのキャリブレーションが変更された可能性があります。これは、アシスタントソフトウェアの
キャリブレーションではありません。スロットルの上限と下限とをESCに記憶させるものです。
ESCの説明書をご覧ください。
とりあえず、思い当たることを回答させていただきました。
投稿者: まーぴー | 2015年04月05日 00:15
日時: 2015年04月05日 00:15
まーぴー様
いろいろとご指導いただき、感謝いたします。
指摘された事をひとつひとつやってみたいと思います。
時間がなくすぐには結果がでないと思いますが、また
ご連絡いたします。
投稿者: mozu | 2015年04月06日 16:23
日時: 2015年04月06日 16:23
初めまして、djiファントムではないのですが質問お願いいたします、ys-4Xクワットコプターについて教えて頂ければと思います、組み込み完成後PC接続でデータ等を設定致しましたがAP Voltageが正常に表示されていません、現在の値は1.5~1.6V位です、起動しますと低電圧エラーでLEDの赤点灯しているのですが設定に問題があるのでしょうか、素人でして皆目検討がつきません、お知恵をかして頂ければと思います、原因は3セル リポで使用しています、よろしくお願いいたします。
投稿者: 平栗輝実 | 2015年04月07日 00:49
日時: 2015年04月07日 00:49
平栗さん、こんばんは、
残念ながら、
ys-4Xクワットコプターについての知識は、まったくございません。
また、知人にもいません。
誠に申し訳ございません。
販売店もしくはメーカーにご質問ください。
以下は、私の想像で、一般論となりますが、
「PC接続で、設定ができた」
⇒ インターフェイスは正常動作している。
機体側のバッテリーは接続して、行いましたか?
Yes
コントローラーへの電源供給は正常です。
No
USBからの電源供給で動作したため、コントローラーへの電源供給は正常でないかもしれません。
「AP Voltageが正常に表示されていません。低電圧エラーでLEDの赤点灯。」
⇒ 接続配線を再確認。
逆極性、コネクタなどの差し込み位置や向きが逆、などを点検してください。
間違いがなければ、電圧センサーなどのハードウェア不良が考えられます。
投稿者: まーぴー | 2015年04月07日 20:30
日時: 2015年04月07日 20:30
早速の回答ありがとうございました、中々このてのコントローラは情報が少ないので、御手数を掛けました。
投稿者: 平栗輝実 | 2015年04月07日 23:06
日時: 2015年04月07日 23:06
平栗さん、
その後、
YS-X4 Multi-Rotor Autopilot
User Manual V 2.2
Revised on June 22th, 2013
を、サクッと目を通しましたが、手掛かりは見つかりませんでした。
配線図からして、
Wi-Fi Module内で、バッテリー電圧値を検出しているように思えます。
おそらく、Wi-Fiモジュール内にA-Dコンバターがあるのでは。
だとすると、Wi-Fiモジュールの不良ではないかと推測します。
他のWi-Fiモジュールと交換してテストできればよいのですが・・・・
投稿者: まーぴー | 2015年04月08日 01:29
日時: 2015年04月08日 01:29
突然の書き込みですみません。
教えてください。
機体はQR X800でNAVA V2を搭載しております。
初めはまったくフライトに問題はありませんでしたが、ジンバル・カメラを交換してからか?わかりませんが、ラダーを打った時にエレベーター舵が混じるようになってしまいました。
エルロン・エレベーターは特に不具合はないです。
何が原因かわかったら、アドバイスお願いします。
投稿者: しみ | 2015年05月26日 19:43
日時: 2015年05月26日 19:43
しみさん、
こんばんは、
「NAVA V2」 は 「NAZA-M V2」と解釈して回答させていただきます。
舵が混じる症状は、初めてのケースです。考えられる要因を、順番に述べます。
まず、アシスタントソフトウェアのビュー画面(または、TXキャリブレーション画面)にて、舵が混じっていないか、カーソルの動きで確認してみてください。
もし、送信機のラダースティック操作で、エレベーターのカーソルが変化するようでしたら、送信機の設定に問題ありそうです。
送信機のミキシングが設定されていないかチェックしてみてください。
そうでなければ、次にパワー系統をチェックしてください。推力に余裕はありますか?
つぎに、コンパスのキャリブレーションを再度行ってみてください。
最終的には、NAZA-M本体の動作不良が考えられます。
ちょっと、気になるのですが、「エレベーター舵が混じる」と「エルロン・エレベーターは特に不具合はないです」の2つの言葉?
(確認のため)エレベーター舵とは、機体を前後に傾ける舵のことです。上昇/下降はスロットル舵となります。
私の場合、
急激なラダー操作をすると、機体が水平のまま上下変動しますが、これは仕方ないみたいです。
ラダーを入れた瞬間とラダーを抜いた瞬間に「ブン」といったモーター音がし、機体が上下に揺れます。
ラダーのゲインを少なくすると、上下変動が抑えられます。あまり少なすぎるとラダー方向の止まりが悪くなります。
投稿者: まーぴー | 2015年05月27日 00:09
日時: 2015年05月27日 00:09
まーぴー様
ありがとうございます。
確認してみます。
言葉足らずですみません。
ゆっくりラダーを打つといいのですが、急激に打つと機体がダウン舵も打ったように舵が混じり機体が落ちそうな位すごいふらつきがおき、スティックを離すと機体は水平状態に戻ります。
エルロン方向とエレベーター方向は舵を大目に打ってもそのようなその他の舵が混じるような事はなく
正常な動きだと思います。
アドバイスして頂きた項目をひとつづつ潰してしてみます。
ラダーのゲインが原因の要因かも?です。
投稿者: しみ | 2015年05月27日 07:51
日時: 2015年05月27日 07:51
しみさん、
おはようございます。
動画を拝見できれば、一番分かりやすいのですが・・・
次の動画の中で、ラダー舵を打った瞬間、機体が上下に変動する様子が録画されております。
https://www.youtube.com/watch?v=MrLIBR1dU-A#t=89
もし同じ現象でしたら、私は、あきらめております。
Basic GainのYawゲインを100%程度にしております。Yawゲインを大きくすると上下の挙動も大きくなります。
Verticalゲインにも多少左右されるようです。
また、機体が定点にとどまらす、ゆっくり円を描くような運動をする場合、コンパスキャリブレーションで改善されることがあります。
気休めになるかもしれませんが、
気圧センサーは、風に対して、とても敏感です。
MCの空きポートなどをテープでふさいでみてください。
投稿者: まーぴー | 2015年05月27日 08:53
日時: 2015年05月27日 08:53
まーぴー様
帰宅してから、アドバイスされたところは全て試してみましたが、だめですね。
右ラダーを打つと右斜め前に機体が傾きます。左ラダーを打つと左斜め前に傾きます。
ゆっくりラダーを打つとその現象は発生しないんですけどね。
気圧センサーのみまだふさいで試してはいませんが、今度試してみます。
なんなんでしょうかね?
投稿者: しみ | 2015年05月27日 21:10
日時: 2015年05月27日 21:10
しみさん、
こんばんは
そうですか・・・
皆目見当がつきませんね!?
前例がありません。
確実に舵が混じっていますね。
気圧センサーについては、ほとんど気休めです。
NAZA-Mの筐体は、ポート(コネクター)部分も、かなり密閉されていますから・・・
MCを完全密封すると、気圧センサーが正常に働かなくなりますし・・・
プロペラ後流がMCを直撃しなければ良いことだし・・・
根拠はありませんが、ダメもとで、アドバンスドキャリブレーションを行ってみたらいかがでしょう!?
数分間かかります。水平な場所(厳密に水平でなくてもよい)で、振動しない場所で行ってください。
進捗バーが、時に逆戻りするかもしれませんが、気長に行ってください。
スマートな、回答ができずにすいません。
投稿者: まーぴー | 2015年05月27日 22:07
日時: 2015年05月27日 22:07
まーぴー様
はじめまして
わたくしマルチコプターに心をうたれ今回オークションで中古機のフルセット(ARRIS M680と思いますプロポはFutabaT10CHG NAZA M-V2を搭載)を購入しました。
ホバリング程度の飛行は問題なかったと思いますが本飛行の前にしっかりマルチコプターについて勉強をやっておこうと思い
たくさんのブログなどを拝見させていただきました。
その中で恥ずかしながらパソコンを使っての設定とはじめて知りました。20年ほど前に飛行機やヘリは随分飛ばしていたので
プロポでの設定は少しは知っていましたが、このように進化してるとは思いませんでした。
毎日全く分からない言葉や英文と戦い近所にマルチコプターをわかっている方もいませんし相談する先がなく 少しあきらめようかと思ったこともありました。そんなときに この大変勉強になるページを見つけまして相談した次第です。
まず日本語版の説明書を拝見させてもらいNAZAのアシスタントソフトウエアをマニュアルに従い起動させてみましたが
機体とUSBで接続しても左下の接続ランプは赤のままで全く動きません 何か不都合があるのでしょうか?
機体のLEDはUSBを差し込むと少し暗い緑の点灯はしております。
マルチコプター初歩スタートなので 分からないことが多いのですが アドバイスやご指導いただけないでしょうか。
投稿者: ひろ | 2015年05月30日 15:59
日時: 2015年05月30日 15:59
ひろさん、
はじめまして、
「大変勉強になるページ」との、おほめのお言葉を頂き、ありがとうございます。
USB通信が正常にできていないのでしょうね!?
通信中は、NAZAのLEDは緑常時点灯となります。
次の点を、確認してください。
・ドライバーソフトはインストールされていますか?
・PCと接続した状態で、NAZAの電源を、OFF⇒ONしてみる。
・USBケーブルの接触不良はありませんか?(PCの他のUSBポートに差し替えてみる、他のUSBケーブルを使用する、などで確認)
以上、お試しください。
また、中古品とのことですので、NAZAのハードウェア不良も視野に入れる必要もあるかと思います。
何かございましたら、ご遠慮なく、ご連絡ください。
投稿者: まーぴー | 2015年05月30日 20:41
日時: 2015年05月30日 20:41
まーぴー様
おはようございます
わたくし未だパソコンをどうにか使う程度でドライバーソフトとインストールソフトはいれて現在デスクトップにはNAZAアシスタント2.20のアイコンは出ております。しかし起動してもアシスタントの画面は出るのですがログイン画面はでてきません。DJIの登録は済ませております。
PCの接続の際のNAZA電源ですがバッテリーをつないでのONでよいのですよね?
他のことは試してみます。
NAZAのハードウエアの不良診断の手段は何かありますでしょうか?
まだ 知ったかぶり程度の 知識で大変お手間をとらせてしまいまして 申し訳ありません。
投稿者: ひろ | 2015年05月31日 09:22
日時: 2015年05月31日 09:22
しみ さんへ
ラダー舵を打った時の機体の上下変動(上昇・下降)の件ですが、
先日、Phantom3 Professonal(完成機)を購入しました。
ラダー舵を打った時の機体の上下変動は、まったく見受けられませんでした。
以前のPhantomが、どうであったか?ですが・・・
ただし、Phantom3には、
気圧計に加えて、3m以下で有効な、光センサーと超音波センサーが付いています。
モーターにサイドスラストが付いています。
こちらの記事をご覧ください↓
http://wcnet.jp/lily/blog0/2015/06/phantom3_professional.html
調整しだいで、改善の余地ありと思われます。
私も、再調整にチャレンジしてみようと思います。
BasicゲインとAttitudeゲインの関係くらいしか思いつきませんが・・・
しみさんの方でも、何か改善策が発見できましたら、ご教授お願いいたします。
投稿者: まーぴー | 2015年06月07日 12:04
日時: 2015年06月07日 12:04
まーぴーさん
あれから、WOOKONGに替えても一緒で。
その後アンテナの位置替えたり、D/R入れたりで何とかって感じです。
しかし、フライト中に突然暴れだしたり、もう安心して飛ばせないんですよね。
もしかしたら、モーター・ESC辺りに何らかの異常があるのかも。
色々とアドバスありがとうございました。
投稿者: しみ | 2015年09月06日 17:59
日時: 2015年09月06日 17:59
しみさん、
ご返事が遅くなり、すいません。
WOOKONG買われたのですね・・・ターゲットロック機能が魅力ですね。
電源周りは大丈夫でしょうか?
モーター・ESCのテストは、個々にサーボテスターでチェックしてみてください。
受送信機のテストをサーボを接続してチェックしてみられたらいかがでしょう。
サーボは安価な数百円で買えるものでOKです。
私の過去の経験で、「急げばまわれ」じゃないですけど・・・
バラバラにして、パーツ1つ1つチェックしていく。
投稿者: まーぴー | 2015年09月07日 22:09
日時: 2015年09月07日 22:09
初めまして。
naza m liteを使っているのですが、フェイルセーフの設定方法が分からずまだ飛ばせません。どのように設定すればいいのか教えて頂けませんか?
送信器は双葉10Jを使用しています。
送信器のSWDを操作してフェイルセーフに入れるようにしたいのでお手数お掛けしますがよろしくお願いいたします。
投稿者: うゆ | 2015年10月17日 13:30
日時: 2015年10月17日 13:30
うゆ さん
こんばんは、
もし、マニュアルモードを使われないなら、(マニュアルモード=水平をキープできません)
Basic ⇒ RC ⇒ Control Mode Switch にて
一番右を、フェイルセーフにしてください。(プルダウンメニューで選択)
FUTABAのプロポは使ったことがないので、具体的に書けませんが、
NAZAの飛行モードCHに、ミキシング可能なCHを割り当てます。
ミキシングSWを割り当てます。 このSWが、ゴーホームSWとなります。
ミキシングON時のオフセット量を調整して、Failsafe位置に移動するように設定します。
投稿者: まーぴー | 2015年10月17日 23:37
日時: 2015年10月17日 23:37
始めましてよろしくお願いいたします f550を購入して組立しました 設定も終了して飛ばしてみると浮かせてその場でクルクル左回転します gpsの取り付け位置が悪いか、デジタルコンパスの校正が悪いのか 解決策があれば教えてください プロポは双葉のt-10です
投稿者: ムラカミ | 2016年01月30日 16:10
日時: 2016年01月30日 16:10
始めましてよろしくお願いいたします f550を購入して組立しました 設定も終了して飛ばしてみると浮かせてその場でクルクル左回転します gpsの取り付け位置が悪いか、デジタルコンパスの校正が悪いのか 解決策があれば教えてください プロポは双葉のt-10です
投稿者: ムラカミ | 2016年01月30日 16:10
日時: 2016年01月30日 16:10
ムラカミさん、
返事が遅くなり、申し訳ございません。
私こと、ペットの猫ちゃんが、交通事故か?なのですが、足を骨折して手術・入院となり、昨日退院しました。
ほぼ毎日チェックしていたブログも2日間ほど見ていなかった次第です。
さて、
症状からは、複数の要因が考えられますので、一つずつ✓していきましょう。
1.モーターの回転方向は正しいでしょうか? CWとCCW ←一番可能性大
2.HEXですよね!? ホバーリング時の6個のモータースピードに大幅な差はないでしょうか? ⇒ ESCの調整
3.TXキャリブレーションで、ラダーのニュートラルがずれていませんか?
ラダーを右に操作しても左回転は止まりませんか?
とりあえず、以上の3点をチェックしてください。
GPSとコンパスは、要因としては可能性が低いです。
結果を教えていただけると、原因が絞れますので、よろしくお願いいたします。
投稿者: まーぴー | 2016年01月31日 02:23
日時: 2016年01月31日 02:23
早速の返信ありがとうございます モーターの回転は合っています ラダーのニュートラルはズレていない様です 後はESCでしょうか? お忙しい中申し訳ありません よろしくお願いします
投稿者: ムラカミ | 2016年01月31日 08:38
日時: 2016年01月31日 08:38
早速の返信ありがとうございます モーターの回転は合っています ラダーのニュートラルはズレていない様です 後はESCでしょうか? お忙しい中申し訳ありません よろしくお願いします
投稿者: ムラカミ | 2016年01月31日 08:38
日時: 2016年01月31日 08:38
ムラカミさん、
おはようございます。
モデルタイプは HEX-V(前方に2つ) でよろしいでしょうか?
そうでしたら、機体を上から見て、右前がM1で、反時計回りにM2、M3~M6となります。
説明書の回転方向は、機体を上から見た場合です。OKでしょうか?
ご存知のように、ヨー軸方向の制御は、モーターの反動トルクで行っています。
間違いがなければ、6組のモーター+ESCにおいて、モーターがまわり始めるスロットル位置とモーターが最大回転数に達するスロットル位置が6組とも同一になるよう、ESCのキャリブレーション(スロットルレンジ調整)を行って見てください。このキャリブレーション方法はESCの説明書を見てください。受信機のスロットルchにESCを接続し、一個ずつ行います。FUTABAの場合、送信機のスロットルchをReverse設定してください。
以上で、問題が解決できないようなら、制御系を疑います。
コンパス・GPSモジュールを外して、Atti.モードで浮かせてみてください。
MCに原因があるのか、コンパスモジュールに原因があるのか判別できます。
投稿者: まーぴー | 2016年01月31日 11:10
日時: 2016年01月31日 11:10
ありがとうございます 実行してみます 当方北海道なので飛ばすには気象条件が良くなければ 飛ばせません気温マイナス10度位の暖かい日を選んで実行します 結果はご報告します
投稿者: ムラカミ | 2016年01月31日 20:52
日時: 2016年01月31日 20:52
ヒエ~-10℃ですか。こちらは岡山県倉敷市に住んでおります。先週-4℃になっとときがありました。凍るような寒さで外出できませんでしたよ~~
猿払村に、ネット友達がいます。
ところで、私は実験していないのですが。。。
プロペラを外した状態で、マルチローター機体の重心を天井に吊るして、動作確認できないでしょうかね???
ヨー軸は反動トルクなので、もしかして回転するかも・・・
投稿者: まーぴー | 2016年01月31日 23:06
日時: 2016年01月31日 23:06
マーピーさま
お陰様で綺麗に飛ぶ様になりました 原因はESCの1箇所の差込方が甘く電流がうまく流れていなかった様です 今ではマルチコプターらしくキレイに飛びました 後は細かい設定をしようと思います 今夕方5時ですがマイナス15度あり10分以上プロポ操作は、非常に厳しいです。 設定する楽しみが増えました これからも疑問点がある説にはご指導お願い致します
投稿者: ムラカミ | 2016年02月01日 17:11
日時: 2016年02月01日 17:11
ムラカミさま、
よかったですね(^^♪
制御不能になるほど回転する場合、駆動系(モーター・ESC)を疑いました。
余談ですが、Y6タイプ、アームが3本で上下にペラがあるタイプ の場合、
ラダーの左右の効きがアンバランスですね。私の友人が作りましたけど・・・
原因は、上側のペラの気流が下側のペラに当たり、結果、下側の負荷が少なくなり、反動トルクも少なくなるためでしょう。
こちらが、その記事です。
http://wcnet.jp/lily/blog0/2012/09/jetfun_scorpiony650.html
私としては、このタイプはお勧めできません。
-15℃ですか。驚異的ですね!! 私には無理です!
このブログは、私の自宅サーバーから発信しております。2006年から、ず~と稼働しています。サーバーPCのスペックが低いため処理がもたつくと思いますが、
お許しください。 近いうちにPCを新しくする予定です。
ここは、コメントが多く、処理に時間がかかると思います。
トップページの最新の記事にコメント頂いても構いません。
記事内容と無関係でもOKですので。
トップページは
http://wcnet.jp/lily/blog0/
また、何かございましたら、いつでもコメントください。
投稿者: まーぴー | 2016年02月02日 01:06
日時: 2016年02月02日 01:06
マーピーさま
お世話になっております 今の所キレイに飛んでおります 一点だけご質問なのですが浮いたら直ぐにLEDが赤点灯します 電圧不足との事ですが二本新しいバッテリーを購入しましたがどちらも直ぐに赤点灯します 電圧は飛ばす前は11.6ボルト赤点灯したら11.0ボルト 2本ともですスロットルも半分以上上げないとホバリングしません 設定が悪いのでしょうか バッテリーが不良なのでしょうか もしお時間が有りましたら教えていただけないでしょうか
投稿者: ムラカミ | 2016年02月04日 17:24
日時: 2016年02月04日 17:24
ムラカミさま、
おそらく、外気温が低すぎるためだと思います。リポに限らず、全てのバッテリーは、気温が下がるとパワーがでません。気温が0℃近くまで低下したら、パワーがかなり低下しますので、-10℃ともなると、かなり低下すると思います。
25℃で、満充電時の電圧は4.2x3=12.6V程度ですので、かなり低いようです。
ムラカミさまの、使用状況下では、第2警告が作動しているようです。第2警告が働くと、スロットルを8割くらいにしないとホバーリングできなくなります。←これは仕様です。
あまりおすすめはできませんが、第1警告、第2警告共に、現在の値より1V低く設定してみてください。
とりあえずは、飛ばせるようになると思います。
それと、寒冷地対策として
・飛行直前まで、車内などでバッテリーを温めてください。
・バッテリーを保温シートで覆うとよいでしょう。
・飛行(ホバリング)中はバッテリーが発熱しますので、バッテリー温度の低下は少ないと思いますが、
着陸後、放置するとバッテリーの温度低下が大きいと思いますので、すぐに車内など暖かい場所に移動させてください。
・私の思いつきですが、「桐バイ貼る」などの使い捨てカイロでバッテリーを温めるってのはどうでしょう!?
投稿者: まーぴー | 2016年02月04日 20:58
日時: 2016年02月04日 20:58
ご指導ありがとうございます エンジンヘリの経験しかなくバッテリーの温度低下 の性能まで気にしてませんでした 気をつけます 有難うございました
投稿者: ムラカミ | 2016年02月05日 12:55
日時: 2016年02月05日 12:55
はじめまして、4年前F550を購入してから何度か遊んでいましたが、遊ぶ時間が作れずそのままでいました。
最近また遊ぶ時間が出来たので、飛ばそうと思ったのですが、完全に色々と設定や操作方法を忘れていましたので
たどり着いたサイトがこちらでした。
アシスタントソフトウェアを起動する事が出来ずにいます。登録を行っているのですがエラーコード0DEエラ―の表示が
でて先に進めません。
何がかんがえられるのでしょうか?
教えていただけないでしょうか よろしくお願いいたします。
投稿者: sakai | 2016年06月19日 05:22
日時: 2016年06月19日 05:22
はじめまして、4年前F550を購入してから何度か遊んでいましたが、遊ぶ時間が作れずそのままでいました。
最近また遊ぶ時間が出来たので、飛ばそうと思ったのですが、完全に色々と設定や操作方法を忘れていましたので
たどり着いたサイトがこちらでした。
アシスタントソフトウェアを起動する事が出来ずにいます。登録を行っているのですがエラーコード0DEエラ―の表示が
でて先に進めません。
何がかんがえられるのでしょうか?
教えていただけないでしょうか よろしくお願いいたします。
投稿者: sakai | 2016年06月19日 05:22
日時: 2016年06月19日 05:22
はじめまして、4年前F550を購入してから何度か遊んでいましたが、遊ぶ時間が作れずそのままでいました。
最近また遊ぶ時間が出来たので、飛ばそうと思ったのですが、完全に色々と設定や操作方法を忘れていましたので
たどり着いたサイトがこちらでした。
アシスタントソフトウェアを起動する事が出来ずにいます。登録を行っているのですがエラーコード0DEエラ―の表示が
でて先に進めません。
何がかんがえられるのでしょうか?
教えていただけないでしょうか よろしくお願いいたします。
投稿者: sakai | 2016年06月19日 05:23
日時: 2016年06月19日 05:23
二度ご発信してしまいました。
申し訳ありません。
投稿者: sakai | 2016年06月19日 05:25
日時: 2016年06月19日 05:25
sakai様、
返事が遅くなって、申し訳ありません。
もう少し、詳細をお教えいただけませんか!?
右クリック⇒「管理者として実行」を試してみてください。
投稿者: まーぴー | 2016年06月19日 23:10
日時: 2016年06月19日 23:10
まーびー 様
返事ありがとうございます。
以前、初期のF550セットを購入致しました。(GPS付)
ジャイロはDJI NAZA 赤と白の色です。 V2画出る前の型です。
以前
は出来ていたパソコンでの設定が出来ない状態です。(初期のアシスタントソフトウェアが全く起動しません。)
宜しくお願いいたします。
投稿者: sakai | 2016年06月19日 23:45
日時: 2016年06月19日 23:45
sakai様、
V2の前のタイプですね。私も使っております。
ファームウェアは、V2ですよね!?
V2の場合、最新のアシスタントソフトウェアでないと使えません。
投稿者: まーぴー | 2016年06月20日 21:52
日時: 2016年06月20日 21:52
まーぴー様
詳しくなくて申し訳ありません。
ファームウェアの単語が何をさしているのかがわかりません。
宜しくお願いいたします。
投稿者: sakai | 2016年06月20日 22:58
日時: 2016年06月20日 22:58
sakai様、こんばんは
コンピューター用語で、ソフトウェアとハードウェアとに大別されます。
ファームウェアは、ソフトウェアのことです。
ソフトウェアには、Windows10などのような基本ソフトウェアやアプリケーションソフトウェアなどに分けられます。
ファームウェアは、機器に組み込み型CPUのソフトウェアを意味します。
NAZAの場合、アシスタントソフトウェアの中に、ファームウェアが含まれています。
エラーコードを、正確に教えていただけませんか?
おそらく、ランタイムエラーだと思いますが・・・
ランタイムエラーとは、プログラムの実行時のエラーのことです。
投稿者: まーぴー | 2016年06月21日 23:46
日時: 2016年06月21日 23:46
まーぴー様
お世話になります。
以前のアシスタントソフトウェアはアンインストールし、新しく
DJI NAZAM Lite Assistant 1.00をインストール致しました。
ソフトは起動いたしましたが、プロポと連動いたしません。
インストールしたソフトがまちがっているのでしょうか
宜しくお願いいたします。
投稿者: sakai | 2016年06月23日 19:08
日時: 2016年06月23日 19:08
はじめまして。
DJI A2 フライトコントラーラーシステムについて、ひとつ疑問があります。
販売店に聞いてもあやふやなので、ご意見をお伺いしたいと思います。
プロポのスロットルスティックを、0~50%(中央)に上げていくとモーター回転も、それにつれて上がっていく、と聞いたことがあるのですが、それで正常なのでしょうか?NAZA M V2(現在使用中)などは、0~50%では回転は上がりません。A2を使うかどうか考えているので、ご教授お願い致します。
投稿者: ホーク | 2017年10月07日 16:19
日時: 2017年10月07日 16:19
ホークさま、
コメントを投稿頂きまして、ありがとうございます。
かなり遅れてのレスとなります。誠にすいません。
A2を使ったことが無いので分かりませんが、
スロットルスティックは、(飛行機の場合と違って)Z軸(高さ方向)の速度調整と考えるのが妥当だと思います。
NAZA V2も、一旦上空に浮いてからは、スロットルスティックを50%未満にしたからといって、いきなりアイドリング回転数まで下がったりはしないと思います。もし、そうであれば急降下します。
PHANTOMなどは、始動後に「ブンブン」と2度回転数が上がります。
想像ですが、「動力系統は正常ですよ」とかの意味を込めて、そのような設計をしたのかもしれませんね。
私の場合、プロポはヘリモードで、スロットルカーブでセンターに不感帯を設けて使っていました。そうしないと高度が一定しないので。
マルチローターに適しているのはスロットルがノーマルセンターが良いですね。幸いなことに(当時)HITECのプロポではそれが出来ました。
適切な回答が出来ず、すいませんでした。
投稿者: まーぴー | 2018年01月13日 20:27
日時: 2018年01月13日 20:27
はじめましてこんにちは。
電子工作発表チャンネル+ドローンという名前でyoutube に動画をUPしている者です。
僕もドローンを自作しようと思いnaza m liteでs550というものを
作りました。飛ばしてみたところ、attiモードでは正常に動くのですが、
Gps モードでは離陸後に突然機体が斜めになりました。手を添えて飛行させたので
墜落はしませんでした。あと、この時gpsの数は6個以上受信できていました。
正常に動かない考えられる理由を教えていただけませんか?
よろしくお願いいたします。
投稿者: 電子工作発表チャンネル+ドローン | 2018年03月18日 10:47
日時: 2018年03月18日 10:47
初めまして
質問お願い致します
F550をNAZA M V2を使っております
リポバッテリーが14.8v4600mahを使用で
飛行時間が5分位なのですが、かなり時間が短い
と思うのですが、何か設定が有れば、
教えて頂けないでしょうか?気温は16度位は
有ったと思います。
ちなみにバッテリーは古く無く
14.8v6000mahを2つ並列使用で
8分位でLEDが赤で点滅します。
設定及び対策をお願い致します。
投稿者: ペペ | 2018年03月26日 00:01
日時: 2018年03月26日 00:01
初めまして
質問お願い致します
F550をNAZA M V2を使っております
リポバッテリーが14.8v4600mahを使用で
飛行時間が5分位なのですが、かなり時間が短い
と思うのですが、何か設定が有れば、
教えて頂けないでしょうか?気温は16度位は
有ったと思います。
ちなみにバッテリーは古く無く
14.8v6000mahを2つ並列使用で
8分位でLEDが赤で点滅します。
設定及び対策をお願い致します。
投稿者: ペペ | 2018年03月26日 00:02
日時: 2018年03月26日 00:02
コメントが迷惑ホルダーに入っていたため、ご返事が遅くなりました。
「attiモードでは正常に動くのですが、Gps モードでは離陸後に突然機体が斜めになりました。」
私の場合はそのような症状になったことがないので、原因が追究できません。
(以下は私の想像です)
・モード切替スイッチチャンネルは正常な範囲に入っていますか?
GPS⇔A⇔M GPS Atti Manual の範囲に入っていますでしょうか?
・送信機側で、他のミキシングは作動していませんか?
「リポバッテリーが14.8v4600mahを使用で飛行時間が5分位」
・バッテリーチェッカーまたは電圧計を使って、NAZAの電圧計の校正を行ってください。
・電圧警告の設定値を低めに設定されてみてはいかがでしょうか!?
バッテリーチェッカーをお持ちでしたら、それでLoss Volatageを測定する方法もあります。
まず、(1)浮上前の電圧値を測定、次に(2)浮上した状態で測定
(1)-(2)= Loss Volatageとなります。
投稿者: まーぴー | 2018年04月07日 23:01
日時: 2018年04月07日 23:01
追伸、
GPSモードではGPSとコンパスの両方を使います。それら2つのセンサーはGPSモジュールに入っています。
GPSモジュールの取り付け向きは正しいでしょうか?
あわせて、Mounting GPS のXYZの値も修正してください。Z軸は下向きがプラスですので注意してください。
投稿者: まーぴー | 2018年04月07日 23:14
日時: 2018年04月07日 23:14
まーぴー様
お返事ありがとうございます
しばらくお返事がなかったので諦めておりましたが、お返事いただけて有難いです
本題ですが
First Level No Load 15.4v Loss 0.8v Loaded 14.5v
Second Level No Load 14.8v Loss 0.8v Loaded 14.0v
NAZAの校正とはキャリブレーションの事でよろしいですか?
キャリブレーションはしております
この設定ですがどうでしょうか?
投稿者: ぺぺ | 2018年05月29日 19:47
日時: 2018年05月29日 19:47
SPYDER850+Wookong-M+T8FGスーパー+R6014FSの構成です
DJI設定サイトやっとたどり着きましたNAZAのサイトのようですが長文質問になりす住みませんがアドバイスくださいよろしくお願いします。
状況:単独でのAMPハイポイント音確認、アプリのFWおよびアプリVeUP完了後各種設定完了(TXキャリブレーション確認)
設定中画面下にMC Output OFF(緑色)確認Uチャンネルプロポ7ch=SW:E M(LEDなし)・A(RGB)・GPS(RB)切り替え確認(F/Sは設定できません)SW:E10回往復でLED(青点灯)、水平(緑点灯)、垂直(白RGB?)点灯確認、アプリ上での設定は完了のつもりですがモーターが起動回転しません、何かの設定ミスおよび設定抜けがあるのだと思いますがアドバイスください但し現在アプリで書き込みコマンドがありませんのであえてしていませんが設定中画面下にMC Output OFF(緑色)確認があれば書き込みできるとありますので登録済みと勝手に判断、再度設定モードで同様の設定値が表示しますので登録書き込みはOKとしています私の頭脳ではこれ以上の手立てはありませんのでよろしくお願いします。
投稿者: 伊藤芳勝 | 2019年06月15日 00:04
日時: 2019年06月15日 00:04
SPYDER850+Wookong-M+T8FGスーパー+R6014FSの構成です
DJI設定サイトやっとたどり着きましたNAZAのサイトのようですが長文質問になりす住みませんがアドバイスくださいよろしくお願いします。
状況:単独でのAMPハイポイント音確認、アプリのFWおよびアプリVeUP完了後各種設定完了(TXキャリブレーション確認)
設定中画面下にMC Output OFF(緑色)確認Uチャンネルプロポ7ch=SW:E M(LEDなし)・A(RGB)・GPS(RB)切り替え確認(F/Sは設定できません)SW:E10回往復でLED(青点灯)、水平(緑点灯)、垂直(白RGB?)点灯確認、アプリ上での設定は完了のつもりですがモーターが起動回転しません、何かの設定ミスおよび設定抜けがあるのだと思いますがアドバイスください但し現在アプリで書き込みコマンドがありませんのであえてしていませんが設定中画面下にMC Output OFF(緑色)確認があれば書き込みできるとありますので登録済みと勝手に判断、再度設定モードで同様の設定値が表示しますので登録書き込みはOKとしています私の頭脳ではこれ以上の手立てはありませんのでよろしくお願いします。
投稿者: 伊藤芳勝 | 2019年06月15日 00:04
日時: 2019年06月15日 00:04
SPYDER850+DJI Wookong-M(GPS)+T8FGスーパー+R6014FSの構成です
一連の設定はアプリで設定完了していますTXキャリブレーション、M-A-GPS切り替え(LED点灯も)およびSW:E10回切り替えで青点灯、水平垂直キャリブレーションLED点灯確認何度もやってもスロットルをあげてもモーターが回転しませんこれ以上私の頭ではなんともなりませんので何かの設定ミス及び抜けなどあると思いますのでアドバイスよろしくお願いします(MUの不良?)。
投稿者: 伊藤芳勝 | 2019年06月15日 00:15
日時: 2019年06月15日 00:15
SPYDER850+DJI Wookong-M(GPS)+T8FGスーパー+R6014FSの構成です
一連の設定はアプリで設定完了していますTXキャリブレーション、M-A-GPS切り替え(LED点灯も)およびSW:E10回切り替えで青点灯、水平垂直キャリブレーションLED点灯確認何度もやってもスロットルをあげてもモーターが回転しませんこれ以上私の頭ではなんともなりませんので何かの設定ミス及び抜けなどあると思いますのでアドバイスよろしくお願いします(MUの不良?)。
投稿者: 伊藤芳勝 | 2019年06月15日 00:15
日時: 2019年06月15日 00:15
すみません慣れないもので何度も同じ記述しました申し訳ありません
投稿者: 伊藤芳勝 | 2019年06月15日 00:17
日時: 2019年06月15日 00:17
伊藤様、
コメントありがとうございます。
念のため、お聞きするのですが、
CSC(Combination Stick Command )は、実行されましたでしょうか?
CSCとは、スロットルは最下、エルロンとラダーは左右のどちらかに一杯、エレベータはフルアップ(スティックを最下)。
安全のため、スロットルスティックだけでは、始動しない仕組みになっております。
投稿者: まーぴー | 2019年06月15日 08:40
日時: 2019年06月15日 08:40
早速の回答ありがとうございます
CSCとはプロポステックをハの字にすることでしょうかトライ済みのつもりです、送信機ON機体電源ONして約30秒から1分ごLED赤消灯後とは思いますが再度電源投入後トライします。
投稿者: 伊藤芳勝 | 2019年06月15日 16:58
日時: 2019年06月15日 16:58
プロポステックをハの字ではなく両ステックを最下右または左にすると起動しました但しスロットルステックを最下にすると起動しなくなりますこれを解消する方法はありますか(スロットルカーブの最下を0%から10%以下に変更するような記載がどこかにあったような気がしますが具体的な方法をアドバイスください。
投稿者: 伊藤芳勝 | 2019年06月15日 17:14
日時: 2019年06月15日 17:14
再起動の件で、すぐにスロットルを上げると起動しますが2秒?以上最下にすると起動しないようです、机上ですがAIL・ELE・RUDの回転変化と傾きを確認しました(RUDのNOR・REVはホバリングなどで確認します)、ドローンは初めてです初飛行時の手順、注意事項がありましたらアドバイスくださいよろしくお願いします。
投稿者: 伊藤芳勝 | 2019年06月15日 17:38
日時: 2019年06月15日 17:38
再起動の件で、すぐにスロットルを上げると起動しますが2秒?以上最下にすると起動しないようです、机上ですがAIL・ELE・RUDの回転変化と傾きを確認しました(RUDのNOR・REVはホバリングなどで確認します)、ドローンは初めてです初飛行時の手順、注意事項がありましたらアドバイスくださいよろしくお願いします。
投稿者: 伊藤芳勝 | 2019年06月15日 17:51
日時: 2019年06月15日 17:51
再起動の意味が? ですが、
机の上でテストということですので、
疑似的に、機体を上にあげてみてください。実際には浮上するわけですから。
当ブログが古いため、「投稿」ボタンをクリックしてから、反映されるまで少々時間がかかります。
使いづらいと思いますが、クリックしてから、しばらくお待ちください。
投稿者: まーぴー | 2019年06月15日 21:22
日時: 2019年06月15日 21:22
ありがとうございます根がせっかちなため再々投稿ご容赦ください申し訳ありません、飛行場での実フライト時注意事項です例えばGPS捕捉をするとLEDの色が何色になるまで地上で待機とかそのような初心者用のアドバイスですよろしくお願いします。
投稿者: 伊藤芳勝 | 2019年06月15日 21:44
日時: 2019年06月15日 21:44
フィールドでの試運転において
まずは、GPSに依存しないテストから行ってみてください。
LEDが確認できる距離でホバリング
バッテリー低電圧警告が適切に設定されているか?
操縦練習も兼ねて、着陸⇔浮上の練習
数回、バッテリーチェッカーでバッテリー残量を確認してみてください。
GPSに依存する飛行
マニュアルの「GPS を使った飛行」⇒「 GPS を使った飛行前に」を読んでおいてください。
Go Home、IOC などをテストしてみてください。
注意事項としては、Homeポジションの設定です。電源投入時(厳密には初期設定完了後)の位置が記憶されることに注意してください。余裕をみて、半径5m以内に障害物がないところにマルチロータを置いて始動してください。
Go Homeの解除方法も、事前に学習しておいてください。もしもの時には役に立ちます。
私は、Go HomeでHomeポジション上空まで戻し、マニュアルに切り替え着陸させていました。
IOCのホームロック飛行には注意してください。
Homeポジションから10m以上離れていないと、正常に動作しません。
あまり、この機能に頼らない方が良いでしょう。
この機能を使えば、遠く離れた機体をエレベータのUP操作のみで自分の位置に戻ってきます。
IOCのコースロック飛行は便利です。
マルチローターの機首方向を見失った場合、これを使うと便利です。
以上、私がマルチローターを始めた頃の経験です。
投稿者: まーぴー | 2019年06月17日 11:26
日時: 2019年06月17日 11:26
詳細なアドバイスありがとうございます、記載内容に気を付けながらMモードで離着陸(BT電圧エラーに気を付ける)練習して次のステップへ移行したいと思います、今後ともよろしくお願いします。
投稿者: 伊藤芳勝 | 2019年06月17日 14:51
日時: 2019年06月17日 14:51
本日午後3時ころ風速約2~3mくらいでフライトテストいたしましたキャリブレーション(フライトモードSW切換、水平、垂直)後3回くらい離着陸、ホバリングいたしましたアドバイスのおかげです大感激です。
フライト時のLEDの状況の確認です、機体電源ON:赤3回点滅は約15秒くらいで無点灯、フライトSW約10回で青点灯フライトSW、Mモード:無点灯、Aモード:緑・赤(黄・オレンジ?)、GPSモード:赤・青(紫?)点灯ですこのような点灯状況でよいのでしょうか。
最初Mモードでフライトを試みましたが風のためか前後左右にかなり揺れるため断念、Aモードでスロットル上昇(但しすぐに回転上昇せずホバリング中点付近に挙げると急に回転が上がりました)多少風がありましたが3軸ジャイロが踏ん張ってくれ手放しは怖くてできませんでしたが何とか踏ん張って止まってくれていましたこの時LEDはオレンジ1回・ムラサキ3回点滅繰り返し(ラダーが風の関係か多少右に振れる?)今度は無風に近いときフライト練習します、何とかフライトできましたGPSモードはある程度上昇しホバリング後切り替えてみますが、前述の通り大感激です今後ともよろしくご指導ください、まずは初フライトの報告ですいつも長々な投稿すみません。
投稿者: 伊藤芳勝 | 2019年06月17日 17:06
日時: 2019年06月17日 17:06
おめでとうございます。異常はないと思われます。
マニュアル40ページの「LED インジケータの説明」をご確認ください。
投稿者: まーぴー | 2019年06月17日 19:37
日時: 2019年06月17日 19:37
追伸、
PHANTOMなどDJIの既製品では、スロットルスティックが、エルロンなどと同様にリターンスプリングで中立になっています。
NAZAの高度は気圧センサーにより安定化されています。
微妙なスティック操作で、高度を安定に保つのが困難であれば、
プロポのスロットルカーブでニュートラル付近を平らにしてみてください。
投稿者: まーぴー | 2019年06月17日 19:44
日時: 2019年06月17日 19:44
早速のアドバイスありがとうございます急がず慎重にフライト練習します。
投稿者: 伊藤芳勝 | 2019年06月17日 19:56
日時: 2019年06月17日 19:56
質問にアドバイスください
1.Wookong-M用Auto Pilot設定付(NAZA専用?)アプリがあるのでしょうか私のアシスタントアプリは2.04ですがDJIサイトにそのようなアプリはなさそうでしたハードウエアで有無を判断して表示しないのでしょうか。
2.Aモードフライト時若干エルロン・エレベータ方向にピクツキながら踏ん張っていますが修正方法としてMモードでフライトし流れる方向で機体重心位置を特定しIMU・GPSの位置再設定をするのですか(GPSモードでは問題ないのでしょうかある程度止めたいため)もしくはアプリ上で調整可能なのでしょうか。
投稿者: 伊藤芳勝 | 2019年06月20日 21:01
日時: 2019年06月20日 21:01
1.
私は、Wookong-M は使ったことがありません。NAZAのみです。
先ほどDJIのHPで確認いたしました。
https://www.dji.com/jp/wookong-m/info#downloads
Wookong-M のアプリはv2.04 のようですね。
2.
Basic Gain および Attitude Gain を調整してみてください。 41ページを参照。
動画で説明しています。こうなります。
http://www2.wcnet.jp/lily/blog0/2013/08/nazam_lite_hexs606.html
投稿者: まーぴー | 2019年06月20日 22:43
日時: 2019年06月20日 22:43
アドバイスありがとうございます、説明書をよく見ないでトライする性格のためご容赦ください、ゲイン調整及びフライトユーチュウブ見てとりあえず100%→150%に設定し再度フライトしながら落ち着くまでゲイン調整します。
投稿者: 伊藤芳勝 | 2019年06月20日 23:34
日時: 2019年06月20日 23:34
本日朝150%でフライト致しました、ほぼ無風でしたので、ピタリ止まりましたAIL、ELE,RUDとも極端なステック操作はしませんがピクツキや暴れる現象は全くありません私のヘリとは大違いですGPSモード、フェイルセーフモードなど設定調整などがありますがのんびり私の性格では難しい気がしますが少しずつ進みたいと思いますこの機体はクラブ員から譲り受けた機体で説明書がありませんのでこのサイトのおかげです、これなら空撮など楽しみです、まだまだ理解していないことがたくさんあると思いますが今後ともよろしくお願いします、まずはお礼まで。
投稿者: 伊藤芳勝 | 2019年06月21日 08:56
日時: 2019年06月21日 08:56
お世話に なります。
人生の下り坂で いくらか ボケ防止にと 今 ドローン夢中になり
ところが そう 簡単にドローンは 飛ぶものではなく 改めて電子
機器に 振り回されておりますが。 ドローン4個の モータは何の
問題は ないと おもいますが上昇ステツクを 上げると すぐさま
横倒しになる、送信機はフタバの T8FGですが。お知恵をいただければ
幸いです。宜しく お願いします。
投稿者: とんとんみ | 2019年07月03日 10:15
日時: 2019年07月03日 10:15
先ほど 投稿しました とんとんーみーですが
ドローンDJIの製品F450です。
どうぞ 宜しく おねがいします。沖縄は
今日も凄く 良い天気です。
投稿者: とんとんーみー | 2019年07月03日 11:17
日時: 2019年07月03日 11:17
リリーの日記にコメントありがとうございます。
さて、本題ですが、
横倒しになる原因は、数多くあります。
ハードウェア設定においては
モーターの回転方向は正しいですか?
また、ペラの正逆も正しいですか?
MC(コントローラ)の取り付け方向は正しいですか? 8ページ参照
など
ソフトウェア設定においては
2. Motor Mixer 13ページ
あなたの場合は「Quad-rotor X」だと思います。
38ページを参照
要因がたくさん考えられますので、とりあえず以上の点を点検してみてください。
投稿者: まーぴー | 2019年07月03日 16:40
日時: 2019年07月03日 16:40
今回 大変にお世話になっております。ドローン飛ばすと
横倒しの件は第3モーターとESCの電源ケーブル断線が
原因と思われました、残念ながら天気が悪く 回復次第
確認するつもりです。またいつか お世話に なります。
投稿者: とんとんみー | 2019年07月05日 17:36
日時: 2019年07月05日 17:36
いつも(りりーの日記)を 有難く 参考させつております。
ドローンの件ですが、飛び上がりましたが フラフラしながら
落下してしまいますが どこか 調整箇所を 教え いただければ
ありがたいのですが。 まことに すみません。 宜しくおねがいします。
投稿者: とんとんみー | 2019年07月06日 13:37
日時: 2019年07月06日 13:37
いつも(りりーの日記)を 有難く 参考させつております。
ドローンの件ですが、飛び上がりましたが フラフラしながら
落下してしまいますが どこか 調整箇所を 教え いただければ
ありがたいのですが。 まことに すみません。 宜しくおねがいします。
投稿者: とんとんみー | 2019年07月06日 13:37
日時: 2019年07月06日 13:37
とんとんみー様、
Q。ドローンの件ですが、飛び上がりましたが フラフラしながら
落下してしまいます。
A。私の経験で、回答したします。
GPSのアンテナ(コンパスが含まれています)の取り付け方向は正しいですか?
リード線が付いている側が前方です。
MCの取り付け方向は正しいですか?
ESCへ接続する側が前方です。
設定 Mounting (12ページ)
Z軸においては下向きがプラスですので、お間違えなく!
IMUキャリブレーション(37ページ)
確認し、必要なら行ってください。
ゲインの調整(19ページ~)
ゲインを加減してみてください。
推奨する設定(41ページ)を参考に
以上、お試しください。
投稿者: まーぴー | 2019年07月06日 22:22
日時: 2019年07月06日 22:22
おはよう 御座います。
飛び上がり 送信機で 操作せずに 1定の場所で安定度 抜群で
実に 素晴らしい 限りです。今回 大変に感謝 しております。
これからも りりーの日記を 利用させて 下さい。
投稿者: とんとんみー | 2019年07月07日 09:55
日時: 2019年07月07日 09:55
昨日は すごく安定して おりましたが 今日は ピン ピンの
音がして何の 反応がしません モーターの回転もできず ただ
音だけする始末ですが MC、ESCがダメなのか ちょうと
アドバイス出来れば たすかりますが。よろしくお願いいたします。
投稿者: とんとんみー | 2019年07月08日 17:38
日時: 2019年07月08日 17:38
ESCやモーターがダメになる確率は低いと思います。まして、4個同時というとありえないでしょう。
ビンビンと言った音がするのであれば、壊れていないと思います。
一度すべてのESCを取り外し、サーボテスターなどで、各々ESCの調整(キャリブレーション)を再設定してはみてはいかがでしょう。
まずは、
モーターのアイドルスピードを変えたらどうなるか試してみてください。13ページを参照
投稿者: まーぴー | 2019年07月08日 20:03
日時: 2019年07月08日 20:03
先日はお電話いただきありがとうございます、おかげさまでフライトもだいぶ慣れたような気がします質問にお答えください、Attiモード及びGPSモードのとき約15mくらい上昇しますがそれ以上高度が上昇(スロットルカーブは0から100の直線設定)しませんスロットルを最高にしても変化がありませんLED点滅に異常?ないようですできれば20mから30mくらいまで上昇したいのですがアドバイスください。
投稿者: 伊藤芳勝 | 2019年07月09日 15:20
日時: 2019年07月09日 15:20
大変失礼しましたアプリ確認したらアドバンス設定→リミットがONで15mになっていましたので20mに変更しました、OFFすれば高度無制限となる?、行動半径もONで30mを100m(それほど遠距離はしませんが)に変更しましたこれもOFFにすれば送受信機の電波到達範囲内(外れればGO-HOME)となると思いますが、確認しないで質問してお手数かけました、今後もとんちんかんな質問すると思いますがよろしくお願いします。
投稿者: 伊藤芳勝 | 2019年07月09日 21:18
日時: 2019年07月09日 21:18
伊藤様、
おはようございます。
Go Homeなどの実験段階ですね。
高度制限は、もう少し高い方が良いかもしれませんね。50m程度に設定。
Go Homeにも関連します。20mを境に帰路が異なります(マニュアル21ページを参照。)
行動半径は100~300mが実用的です。最初は小さくして、リミットが働いたらどうなるか確認してください。
IOCのホームロックを使用する場合はリミットを100m以上で実験してみてください。
ホームポジションより10m未満の距離では正常に作動しません。ホームロックにより手元に戻してきた場合、10mより接近すると操縦ががおかしくなりますので、すぐにIOCを切ってください。
投稿者: まーぴー | 2019年07月10日 09:08
日時: 2019年07月10日 09:08
いつも的確なアドバイスありがとうございます、フェイルセーフ機能はもう少し完熟飛行経験してからにします空撮テストでエレベータステックを操作しながら歩行するとノッキング?(多少ステックがぶれカクンカクンします)プロポエレベータトリムを入れて定速飛行ができると思いますがリスクが大きいですか、もちろん終了後戻しますが。
投稿者: 伊藤芳勝 | 2019年07月10日 15:36
日時: 2019年07月10日 15:36
伊藤様、
おっしゃる通り、私にとっても困難です。ヘリと違い、スティックを離すと急停止しますからね。
トリムを使っても、エレベーターとエルロン方向には、徐々に加速していきますので、一定の操作量とはなりません。
そのようなとき、私は
・エレベーター、エルロン、ラダーに大きなエクスポネンシャルを加えています。
・スティック操作は、(スティックの先端に親指を乗せるのではなく)スティックの横(上下左右)を指で押すように操作しています。
このとき、指は送信機にも接しています。こうすると指の震えも抑えられて、一定量に保つのが容易になります。
投稿者: まーぴー | 2019年07月10日 20:58
日時: 2019年07月10日 20:58
了解ですDJIのアプリに定速設定はありませんか高度や移動距離の設定はありますが速度の設定項目はなかったような?、アドバイスを見る限りなさそうですが、私もステックの根元をボディーに添えて操作しますが走ったり足場が悪いと加減速します、空撮中は基本ホバリング中なのでエレベータEXPを大げさに加えるのはありと思います又トリムも試してみます的確なアドバイスいつもありがとうございます。
投稿者: 伊藤芳勝 | 2019年07月11日 20:49
日時: 2019年07月11日 20:49
いつも (りりーの日記)を 参考に 助かつて おりますが
DJIのF450ですがスキツド跳ね上げ式を取り付けた場合
とびあがらず。 どこか 説定が 悪いと おもいますが
どこかの説定 不足だと おもいますが アドバイス 出来れば
幸いです どうぞ 御面倒 かけますが 宜しくねがいます
投稿者: とんとんみー | 2019年07月23日 11:22
日時: 2019年07月23日 11:22