NAZAのファームウェアv3.12より、Receiver Advanced Protection(受信側の高度な保護)が追加されました。
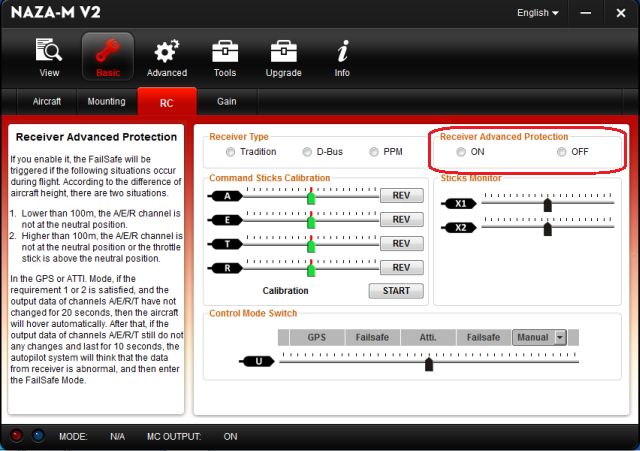
これを有効にすると、次のような状況が発生した場合、フェイルセーフのきっかけとなります。
航空機の高度差によって、2つの状況があります。
1. 100メートルよりも低いとき、A/E/Rチャンネルがニュートラルでない。
2. 100メートルよりも高いとき、A/E/Rチャンネルがニュートラルでない、またはスロットルスティックがニュートラルを超えている。
GPSまたはATTI.モードにおいて、1または2の要件が満たされ、A/E/R/Tチャネルの出力データが20秒間変化していなかった場合、航空機は自動的にホバリングします。
その後、10秒経過してもA/E/R/Tチャネルの出力データが変化しない場合は、自動操縦システムが、受信機からのデータが異常だと思い、フェイルセーフモードに入ります。
コメント (6)
いつもアドバイスを有難う御座います。
今日朝からアドバイスに沿って確認作業を進めました。
① アシスタントファイルのベーシックのRCのレシーバー アドバンスド プロテクション を「ON」で設定しました。
昨日は ON も OFF も入れて無かったと思います。
② コントロールスティック キャリブレーションを済ませた後に、プロポのエンドポイントを95ポイントまで落としました。
エンドポイントを落としてから、キャリブレーションをすると正常に出来ませんでした。
この2点を対策した後に、外に持って行き通電しました。
最初は、黄赤の高速点滅でしたが・・・
7~12回後には、正常に認識したLED点滅に変わりました。
(家のPC・TV部屋では、一発正常認識するんだけど・・・)
飛ばした感じは・・・
① 高度変化が少なくなった感じです。
② Ver2.02の時は、右に流れてましたが・・・(無風でも)Ver3.12では、流れなくなりました。
概ね、アップデートは成功したと思われます。
通電時の、高速黄赤点滅の回数が少なくなってくれれば 完璧 でしょうね。
投稿者: 敏ボー | 2013年05月19日 11:04
日時: 2013年05月19日 11:04
---追伸---
アシスタントファイルで、コマンド スティック キャリブレーション を掛けて
プロポから、エンドポイントを95%に落として・・・
アシスタントファイルを閉じてUSBケーブルを外して
再度、ケーブルを繋ぎアシスタントファイルを開いて ビュー画面のスティック移動量もニュートラルのズレが±2 程度
移動量も上下に 95ポイント動きます。
投稿者: 敏ボー | 2013年05月19日 11:14
日時: 2013年05月19日 11:14
おめでとうございます。
とりあえず、様子を観察しながら進めていきましょう。
コマンド スティック キャリブレーション において分かったこと(v3.12において)
1.コマンド スティック キャリブレーションが終えた直後にViewメニューのモニターでは、ずれています。しかし、NAZAを再起動したら、ちゃんとスティックがニュートラル位置で、ゼロになっています。
2.送信機のトリムを数コマワザとずらし、NAZAの電源を入れると、同モニターではゼロになります。
トリムを最大にずらしてNAZAをオンした場合はモニターでゼロになりませんでした。
3.スライダーバアーは±76程度の範囲で緑になります。
気になるのは2です。(想像ですが)NAZAが初期化段階で、現在の受信機の出力信号をニュートラルとみなすようプログラムされているのかもしれません。ただし、これは、ある範囲内で、それを超えるとエラーとなるようです。
投稿者: まーぴー | 2013年05月19日 15:23
日時: 2013年05月19日 15:23
今日はあれから7Fしました。
① 自力で、LED点滅が正常になり立ち上がったのが・・・2回
② 自力で立ち上がらなかったので、何かしなきゃと思い
GPS コンパスキャリブレーション(スイッチパチパチ6回以上で水平クルリ。垂直クルリ。)をしたら
自力で立ち上がったのが・・・3回
③ ②でも立ち上がらなかったので、一度断線し
再度、電源接続で自力で立ち上がったのが・・・1回
④ ③で立ち上がらなかったので
GPS コンパスキャリブレーションして立ち上がったのが・・・1回 です。
少しづつ良い方向に進んでます。
この、「GPS キャリブレーション」をすると立ち上がるのに何かが潜んでそうに思うのですが・・・??
IMUキャリブレーションのベーシック・アドバンスを、場所を変えてやって見ます。
飛ばしてみて、
ホバ中の高度変化が少なくなったのは良いですね。
ホバ中の機体の流れが、1Mもしなくなったのは良いですね。
こころなしか、風にも強くなった気がします。(定かでないですが・・・)
後、こんな情報を仕入れました。
DJIにロングアームが出るとか・・・
http://blogs.yahoo.co.jp/yahata76/55534813.html
投稿者: 敏ボー | 2013年05月19日 17:31
日時: 2013年05月19日 17:31
今日はあれから7Fしました。
① 自力で、LED点滅が正常になり立ち上がったのが・・・2回
② 自力で立ち上がらなかったので、何かしなきゃと思い
GPS コンパスキャリブレーション(スイッチパチパチ6回以上で水平クルリ。垂直クルリ。)をしたら
自力で立ち上がったのが・・・3回
③ ②でも立ち上がらなかったので、一度断線し
再度、電源接続で自力で立ち上がったのが・・・1回
④ ③で立ち上がらなかったので
GPS コンパスキャリブレーションして立ち上がったのが・・・1回 です。
少しづつ良い方向に進んでます。
この、「GPS キャリブレーション」をすると立ち上がるのに何かが潜んでそうに思うのですが・・・??
IMUキャリブレーションのベーシック・アドバンスを、場所を変えてやって見ます。
飛ばしてみて、
ホバ中の高度変化が少なくなったのは良いですね。
ホバ中の機体の流れが、1Mもしなくなったのは良いですね。
こころなしか、風にも強くなった気がします。(定かでないですが・・・)
後、こんな情報を仕入れました。
DJIにロングアームが出るとか・・・
http://blogs.yahoo.co.jp/yahata76/55534813.html
投稿者: 敏ボー | 2013年05月19日 17:32
日時: 2013年05月19日 17:32
そうですか
でも、何が原因なんでしょうね?
敏ボーさんは、正確に手順を踏まれておられると思いますので、なおさら気になります。
ちょと、コンパスの値を調べてみました。参考になるか?ですが。
室内にて、水平に機体を360度回してみたところ
Compas(raw)
xは -90 ~ 290 、yは -190 ~ 190 、zは、ほぼ200
Modは、ほぼ1100
となりました。
ヘルプを見ると、raw値は 500~-500 、 Mod値は 750 ~ 2250 とあります。
rawは生(加工前)データー、modは加工(修正)後データー を意味します。
投稿者: まーぴー | 2013年05月19日 19:30
日時: 2013年05月19日 19:30