【Micro Beast のファームウェアのアップデート 方法】
◆ 手順
1. インターフェイス「USB2SYS」が必要です。
2. Beast X ソフトウェアをダウンロードします。
3. Beast X ソフトウェアをインストールします。
4. Micro Beast のシリアルNo.(16進数24桁)を調べます。
5. ファームウェアファイル(update_*.upd)をメールで入手します。
6. Micro Beast をアップデートします。
7. 複数のMicro Beastを アップデートする場合。
◆ 1. インターフェイス「USB2SYS」が必要です。

◆ 2. Beast X ソフトウェアをダウンロードします。
Beast X のサイトからダウンロードします。
http://www.beastx.com/service_software.html

Windows用とMac用とが用意されています。
「DOWNLOAD」をクリックして、保存します。
◆ 3. Beast X ソフトウェアをインストールします。

「BEASTXSoftwareBundle.msi」をダブルクリック(インストール)します。
セキュリティの警告が出ます。 「実行」をクリックすると、インストーラーが起動します。
「Next>」をクリックします。
「Next>」をクリックします。
「Next>」をクリックします。
「Close」をクリックします。
◆ 4. Micro Beast のシリアルNo.(16進数24桁)を調べます。
・インターフェイスをPCのUSBポートに差し込みます。
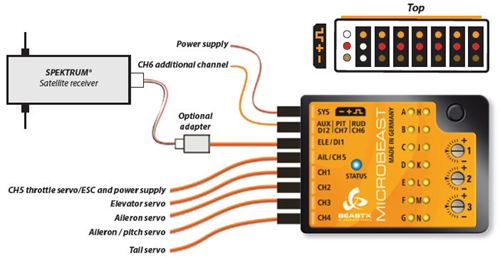
・インターフェイスとMicroBeastのSYSとを付属の3ピンオス-オスケーブルで接続します。

・MicroBeastに電源を供給します。
別電源を使うことをお勧めします。 動力用バッテリーを接続して、ESCのBECから供給する場合は、モーターとESC間を切り離して、安全を考慮してください。

デスクトップにできた、「BEASTX MicroSettings」をダブルクリックして、実行します。
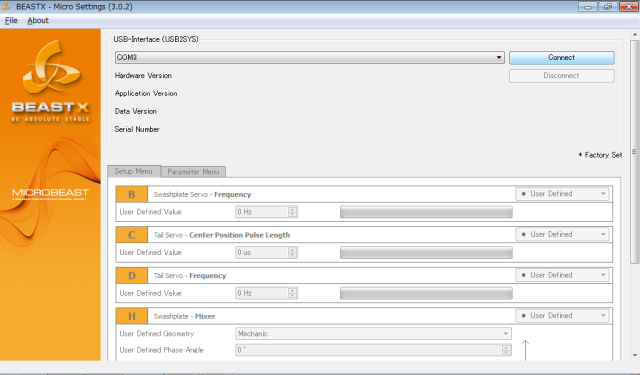
正しいポートを選択して、「Connect」をクリックします。
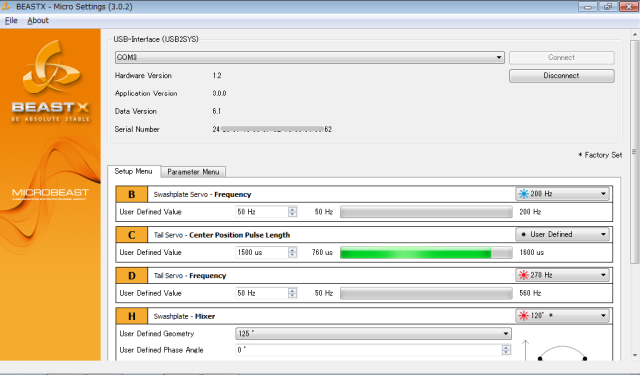
Serial Number の数値(16進数24桁)をメモ(またはコピー)します。(注)この行のみコピー可
このソフトウェアでは、Witeボタンなどは無く、変更が即座に反映されますので気を付けてください。
◆ 5. ファームウェアファイル(update_*.upd)をメールで入手します。
Beast X アップデートのサイトにアクセスします。
http://update.beastx.com/
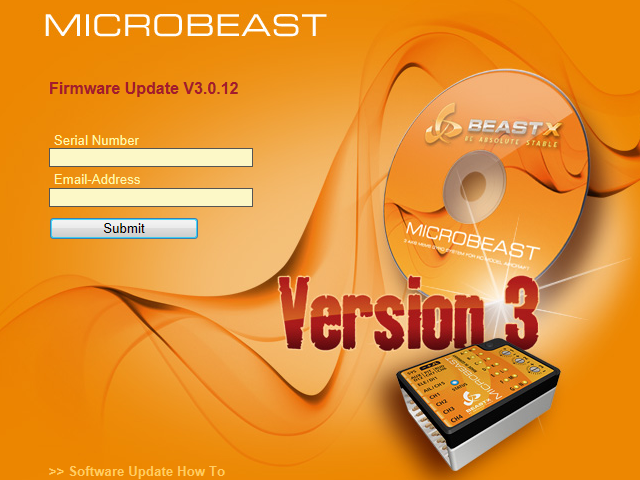
Serial Number (16進数24桁)とEmail-Address(メールアドレス、架空のものはだめ)を記入し、「Submit」をクリックします。
Serial Number の途中の空白は詰めても、そのままでもOKです。
しばらくすると、メールが届きます。
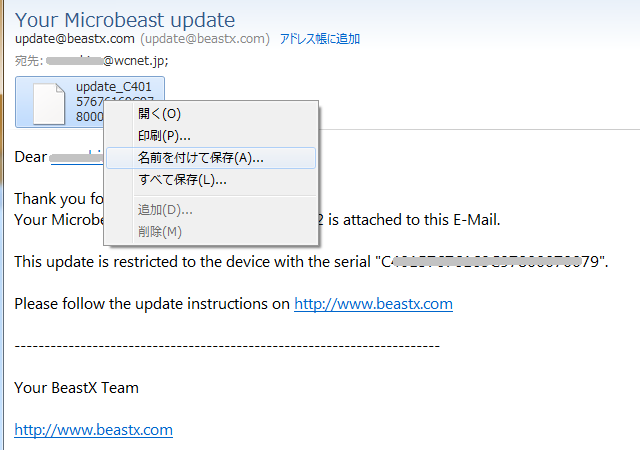
添付ファイルを右クリック、「名前を付けて保存」を選択し、保存場所を選択して保存します。
名前は変更しない方が良いです。
◆ 6. Micro Beast をアップデートします。
・インターフェイスをPCのUSBポートに差し込みます。
・インターフェイスとMicroBeast のSYS とを付属の3ピンオス-オスケーブルで接続します。
・MicroBeast に電源を供給します。

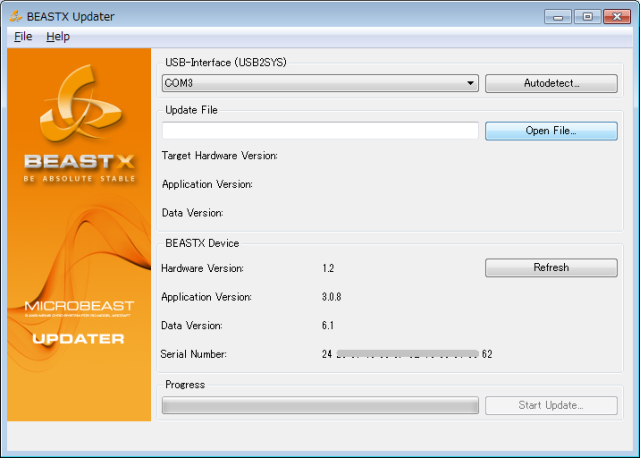
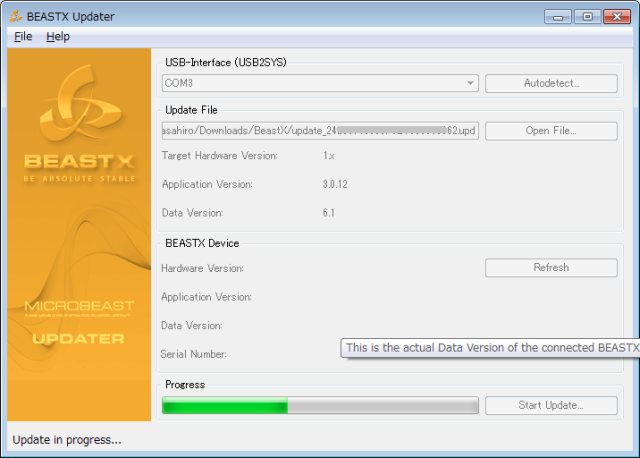
デスクトップの「BEASTX Updater」をダブルクリックして、実行します。
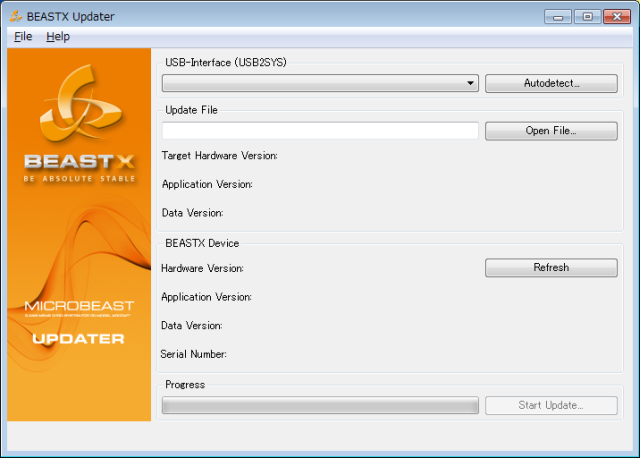
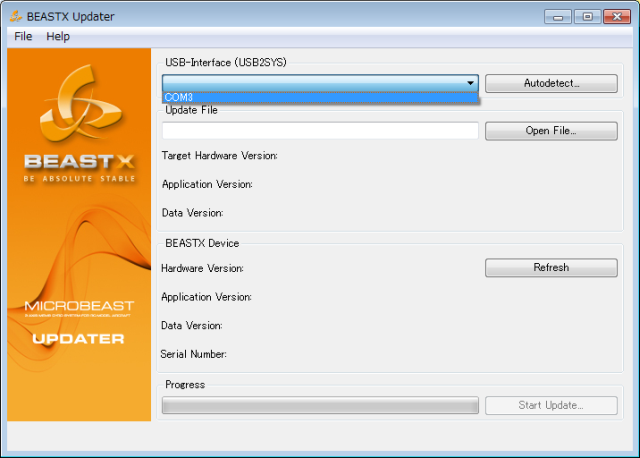
USB-Interface(USB2SYS)欄で、正しいUSBポートを選択します。
「Open File」をクリックします。
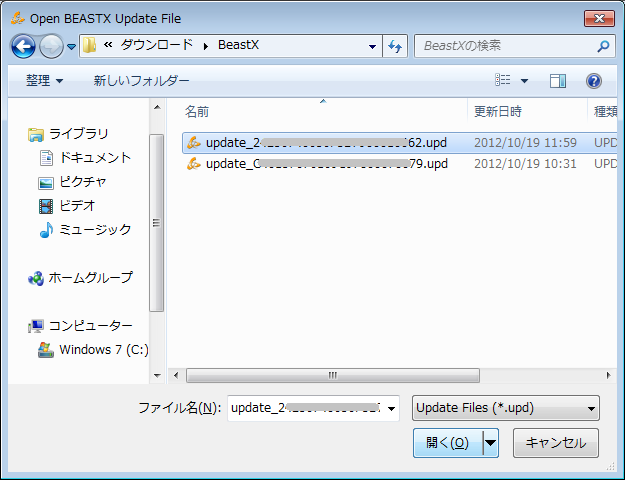
先ほど入手したファームウェアファイル(update_*.upd)を選択し、「開く」をクリックします。
複数ある場合は、デバイスと同じシリアル番号のファイルを選択します。
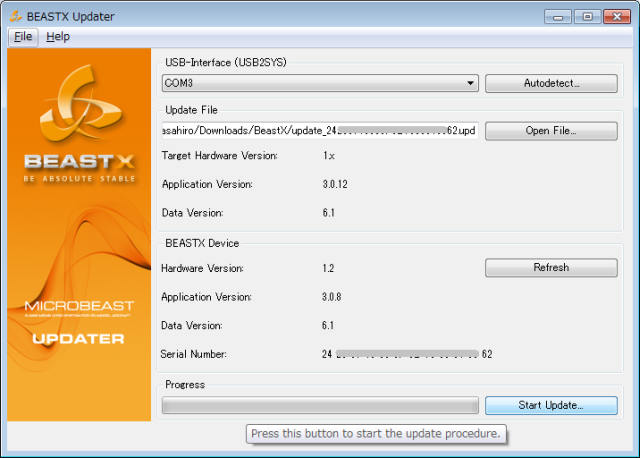
「Start Update」をクリックします。
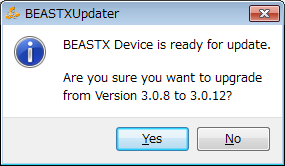
「Yes」をクリックします。
「OK」をクリックします。
これで、完了です。
◆ 7. 複数のMicro Beast をアップデートする場合。
手順3および手順4を繰り返し、所有するデバイス分のファームウェアファイルを入手する必要があります。
(メールに記載されています。)
4. Micro Beast のシリアルNo.(16進数24桁)を調べます。
5. ファームウェアファイル(update_*.upd)をメールで入手します。
シリアルNo.の異なるファームウェアファイルを選択し、アップデートしようとしたら、次のようなメッセージが出ます。
シリアルNo.が異なるファイルはハッシュ値も異なります。(ファイルの内容が異なる)

気になって、内容を見たら、バイナリーではなく、文字(ASCIIコード)で16進数で記述されていました。
しかも、暗号化してあります。(内容の一部ではなく全体が異なる)
おそらくシリアルNo.をキーとして、秘密のアルゴリズムで暗号化しているのでしょう。
つまり、プログラムを知られたくない意図でしょうね。
どうせなら、
ユーザー登録して、後日アップデートがあったとき、自動でメールが届くなんてシステムになっていたらありがたいですね。