DJI NAZA-M(赤色)もファームウェアをv3.10にアップデートすることにより、DJI NAZA-M V2相当へアップグレードできるようです。
ただし、V2全ての機能を使いたい場合はV2付属のPMUが必要です。
以下、DJI NAZA-M V1のアップデート(v2.02または2.01)⇒v3.10)方法を記載します。
(万一、不具合が出た場合、バージョン2.02に戻せますので安心してください。)
【 本記事の目次 】
1. DJIのウエブサイトからインストーラーをダウンロードします。
2. インストールします。
3. アシスタントソフトウェアの起動とファームウェアのアップデート
4. IMUキャリブレーション(必須)
5. 姿勢制御モードスイッチで「Go Home」も可能になります
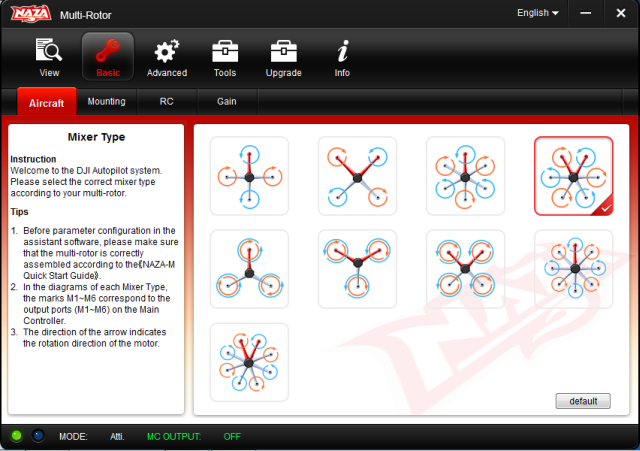
6. オクトコプター(8-ローター)をサポート
7. 元のバージョン(v2.02)に戻すには
8. V2のPMUを使った配線
9. 異常なLED表示の意味とトラブルシューティング
10. 飛行させてみて
1. DJIのウエブサイトからインストーラーをダウンロードします。
http://www.dji-innovations.com/download/naza-m-downloads/
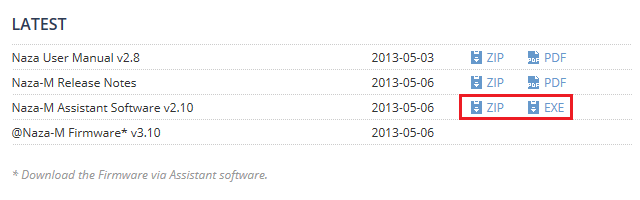
Naza-M Assistant Software v2.10のZIPまたはEXEのいずれかをクリックし、保存します。
ZIPを選択した場合は、ダウンロード後、解凍します。(右クリック⇒「すべて展開」)
(参考) NAZAM_2.10_Installer.exe のハッシュ値
CRC32: CC5F8959
MD5: 573814C6FDE2D9FF5693DBACD95EFBF6
SHA-1: 4E4B75CECD6F2CA4089DB5908FD38945288235DA
2. インストールします。
次のファイルを実行するとインストーラーが起動しますので、指示に従って完了させます。
以前の「DJI NAZA Assistant_1.8」はアンインストールしなくても構いません。
このインストーラーのデフォルト設定では、プログラムおよびショートカットの格納場所が、分かれますので大丈夫です。
(参考) スタートメニューとプログラム格納場所
v1.8
C:\ProgramData\Microsoft\Windows\Start Menu\Programs\DJI Product\DJI NAZA Assistant_1.8
C:\Program Files\DJI Product\DJI NAZA Assistant_1.8
v2.1
C:\ProgramData\Microsoft\Windows\Start Menu\Programs\DJI Product\DJI NAZAM Assistant
C:\Program Files\DJI Product\DJI NAZAM Assistant_2.10
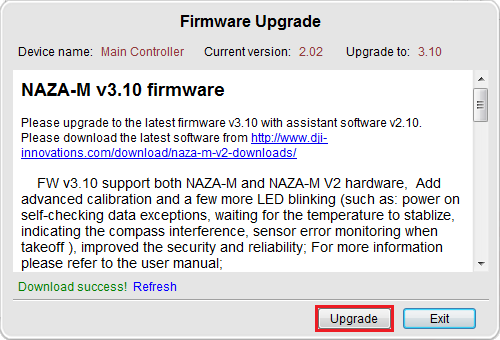
3. アシスタントソフトウェアの起動とファームウェアのアップデート
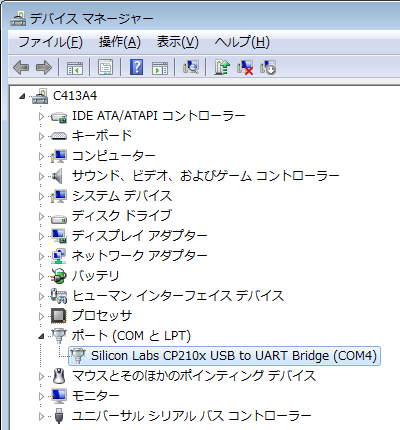
NAZAとPCとをUSBケーブルで接続します。
アシスタントソフトウェアを起動します。

NAZAに電源を供給します。
(メールアドレスとパスワードを尋ねられる場合があります)
「Upgrade」をクリックします。
念のため、プロペラを外しておきます。(今まで回ったことはありませんでしたが・・・)
「Yes」をクリックします。
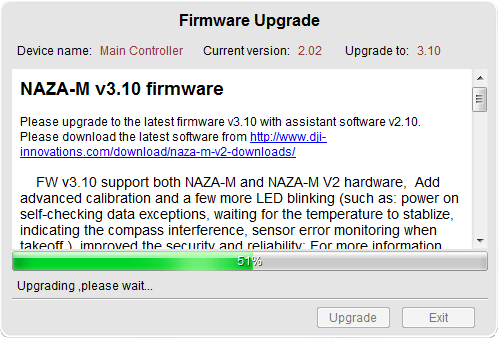
進捗バーが100%になるまで待ちます。
アナウンスが表示されます。 一応、目を通して、「Close」をクリックします。
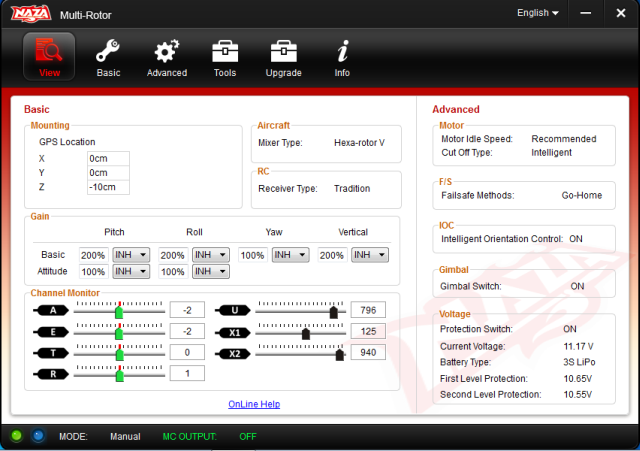
Viewメニューが表示されます。 以前の設定が継続されているはずですが、確認してください。
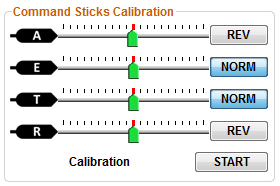
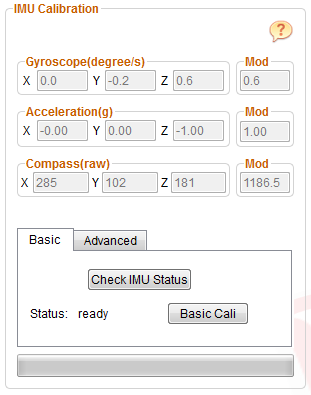
4. IMUキャリブレーション(必須)
Toolsメニューを表示させます。
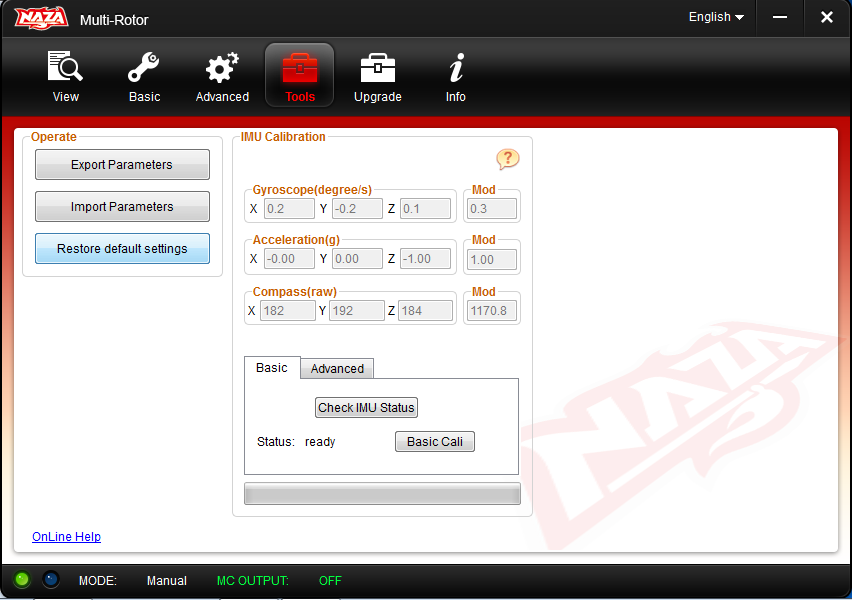
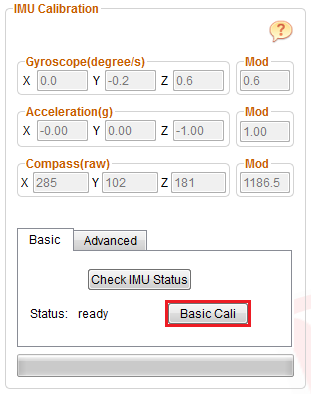
ベーシックIMUキャリブレーションを行います。
Basicタブの「Basic Cali」をクリックします。
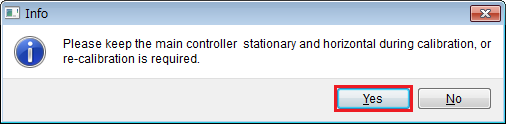
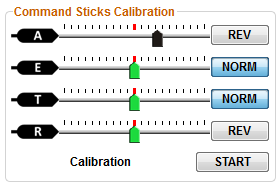
「(再)キャリブレーション中は、機体(MC)を水平に静止させておく必要があります。」という指示が出ますので従ってください。
「Yes」をクリックします。
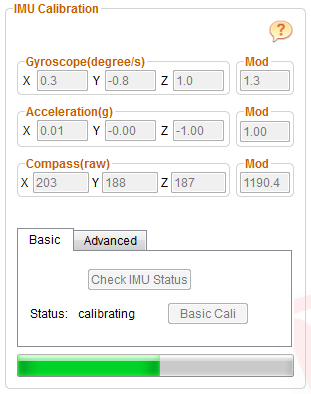
進捗バーが表示されます。(5秒程度で完了)
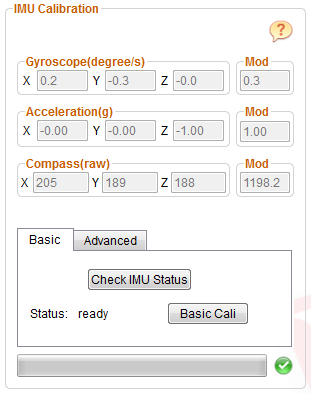
完了しました。
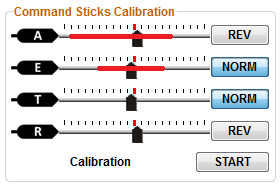
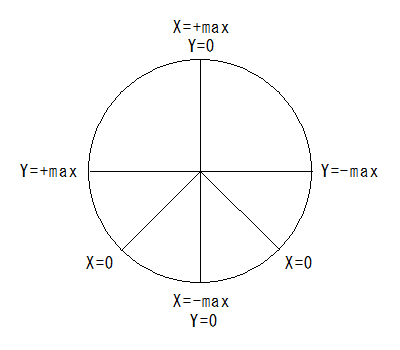
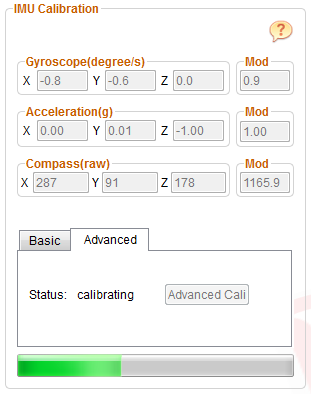
アドバンスドIMUキャリブレーションを行います。
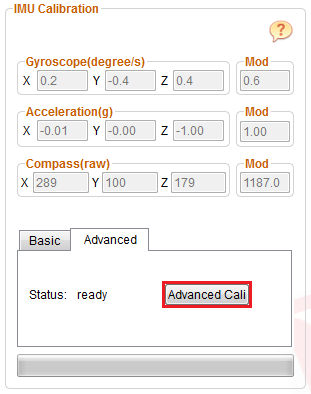
Advancedタブの「Advanced Cali」をクリックします。
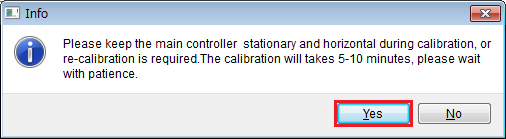
「(再)キャリブレーション中は、機体(MC)を水平に静止させておく必要があります。このキャリブレーションには5~10分かかりますので、根気よく待ってください。」という指示が出ますので従ってください。
「Yes」をクリックします。
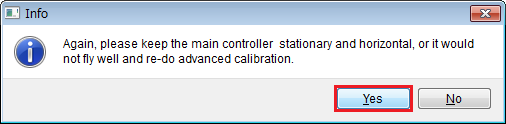
「再度、機体(MC)を水平に静止させてください。うまく飛行しない場合はアドバンスドキャリブレーションを再実行してください。」という指示が出ます。
「Yes」をクリックします。
進捗バーが表示されます。(進行速度は一定ではありません)
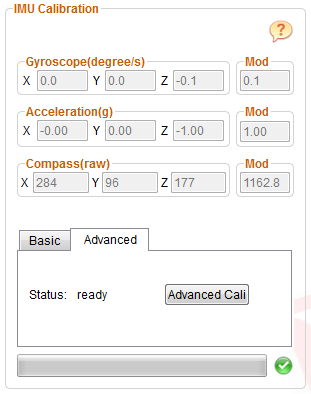
完了しました。
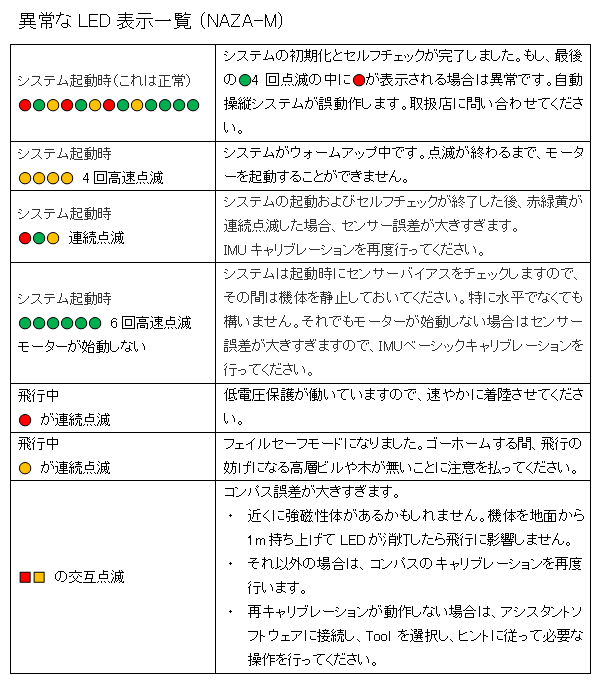
【ヒント】 LED赤?オレンジ?が高速点滅しモーターが起動しない場合は、このキャリブレーションをやり直してみてください。
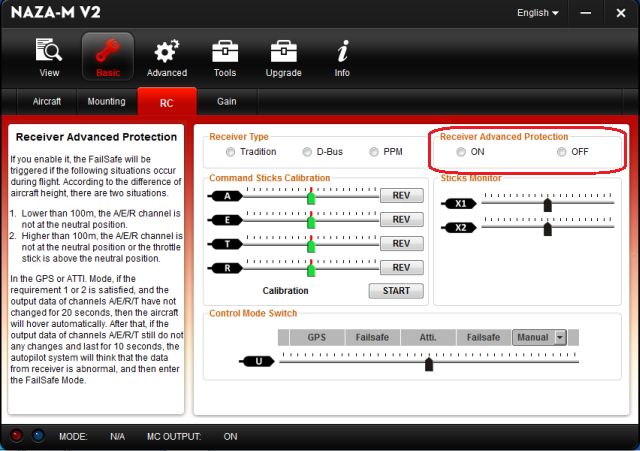
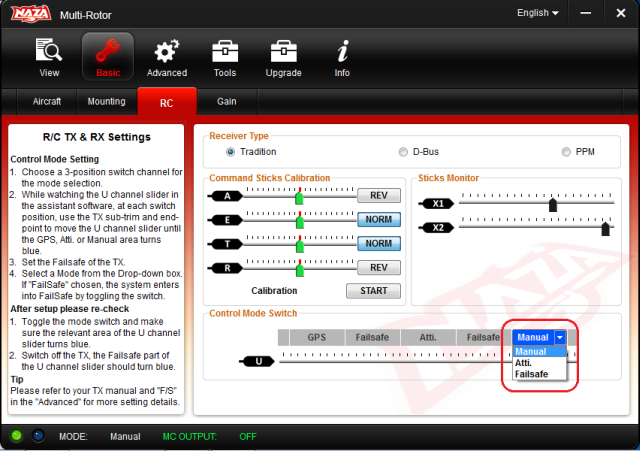
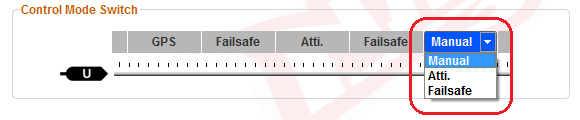
5. 姿勢制御モードスイッチで「Go Home」も可能になります
従来のManual位置の動作が選択できます。
6. オクトコプター(8-ローター)をサポート
ESCをF1とF2 ポートに接続しますので、ジンバル制御はできなくなります。
7. 元のバージョン(v2.02)に戻すには
以前の「DJI NAZA Assistant_1.8」を起動し、「Upgrade」を行います。
設定値は継続されますが、確認してください。
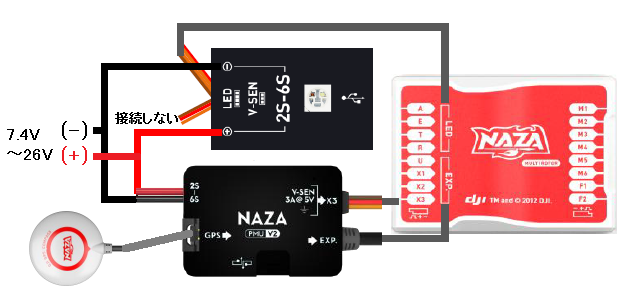
8. V2のPMUを使った配線
CAN BUSポートを備えたPMUモジュールを使って、iOSD、GoProジンバル、Bluetooth LEDモジュールなどを使うことができます。 ← (説明文によると)
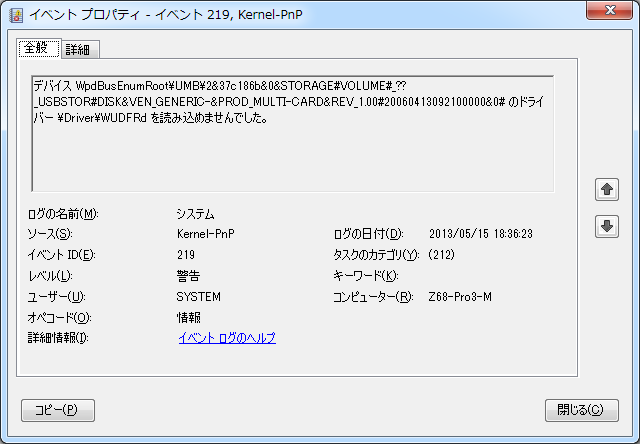
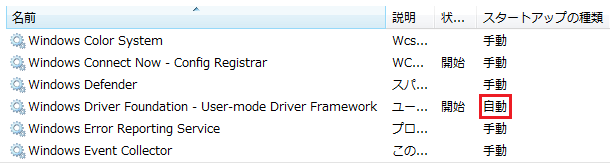
9. 異常なLED表示の意味とトラブルシューティング
10. 飛行させてみて
以前より安定しています。無風だからかもしれませんが、GPS Atti.モードにおいて、位置・高度ともに定位置を保持しています。
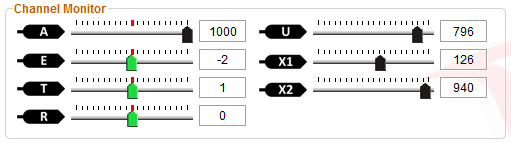
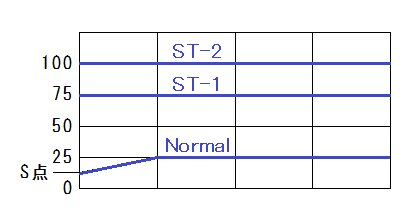
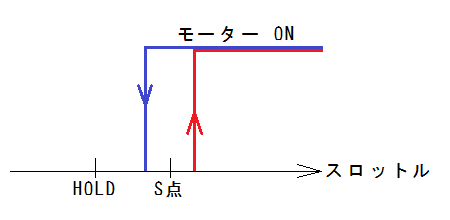
(GPS)Atti.モードのとき、離陸時、スロットル中央まで、ほとんどモーター回転数が上がらず、中央を超えた頃から、モーター回転数が急上昇します。 これは、モーターの回転数だけで、離陸・着陸時ともにスムースです。
飛行中にNormalモードに変えると、急激に降下することがあるので、低い高度においては注意が必要です。
<ただいま、更新中>