◆ 前提条件
2台以上のPCがルーター経由でインターネット(WAN)に接続されている。
次の手順で行います。
1. LANで接続されている他のPCからアクセスできるようにします。
2. WAN側からアクセスできるようにします。(インターネットに公開)
3. DDNSを使って、名前でアクセスできるようにします。
◆ サーバーPCのLAN側IPアドレスを固定する。
「コントロールパネル」 ⇒ (ネットワークとインターネット) ⇒ 「ネットワークと共有センター」 を開きます。
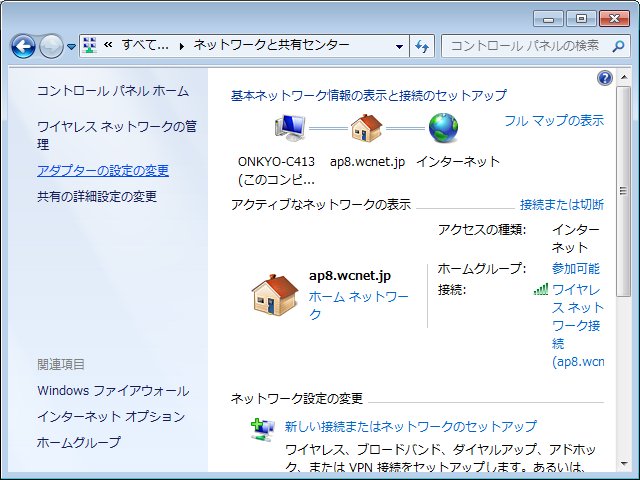
「アダプターの設定の変更」 をクリックします。
「ローカルエリア接続」 をダブルクリックします。
「ワイヤレスネットワーク接続」 でもできます。
「詳細」 をクリックします。
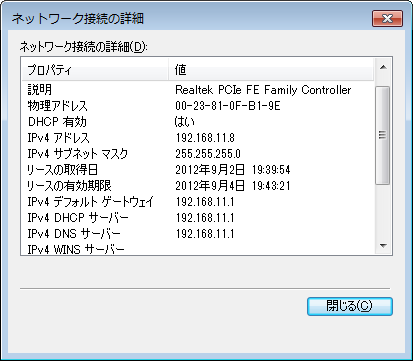
・IPv4 アドレス
・IPv4 サブネットマスク
・IPv4 デフォルト ゲートウェイ
・IPv4 DNSサーバー
の項目をメモしておきます。
「閉じる」 をクリックします。
今度は、「プロパティ」 をクリックします。
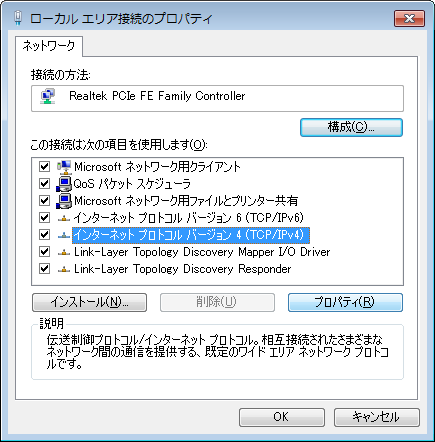
インターネット プロトコル バージョン 4 (TCP/IPv4) を選択し、「プロパティ」 をクリックします。
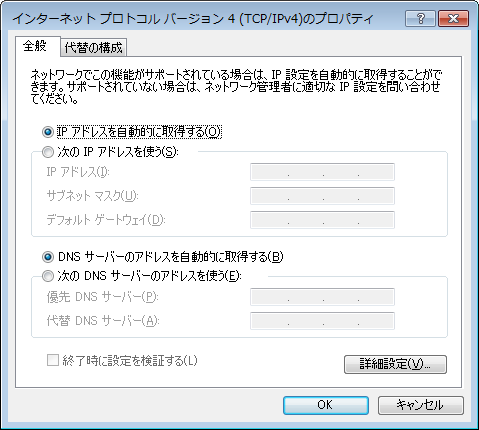
◎次の IP アドレスを使う ◎次の DNS サーバーのアドレスを使う を選択します。
・IP アドレス
メモした、IPv4 アドレスの末尾を88など任意の数値にします。DHCPで使用されていない数値が良いでしょう。 (◆ ルーターの設定 を参照)
・サブネット マスク
メモした、IPv4 サブネット マスク の値 (ほとんどの場合 255.255.255.0 です)
・デフォルト ゲートウェイ
メモした、IPv4 デフォルト ゲートウェイ の値
・優先 DNS サーバー
メモした、IPv4 DNS サーバー の値
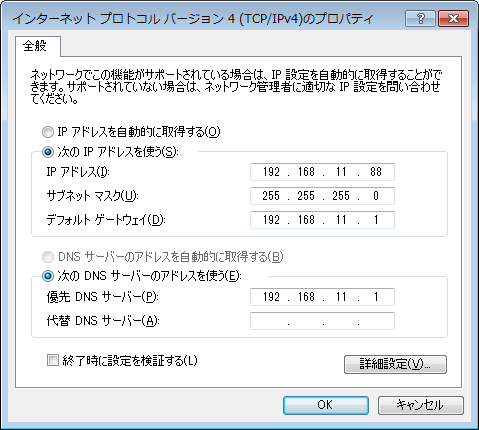
「OK」 をクリックします。
これで、サーバーPCのIPアドレスが固定しました。
◆ Windowsファイアウォールの設定
「ネットワークと共有センター」 を開きます。 (既に開いていると思います。)
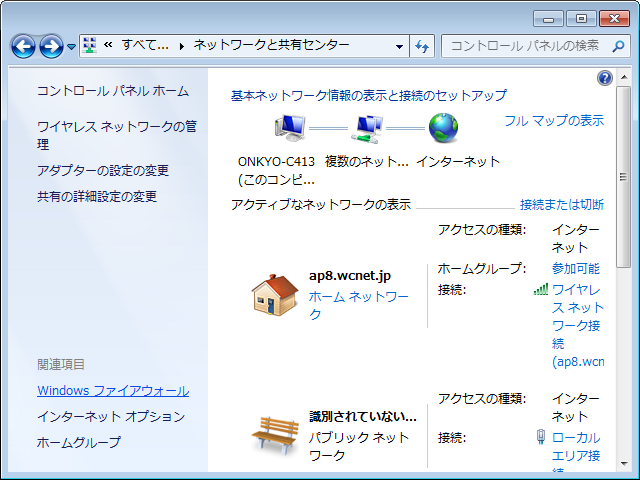
「Windowsファイアウォール」 をクリックします。
「Windowsファイアウォールの有効化または無効化」 をクリックします。
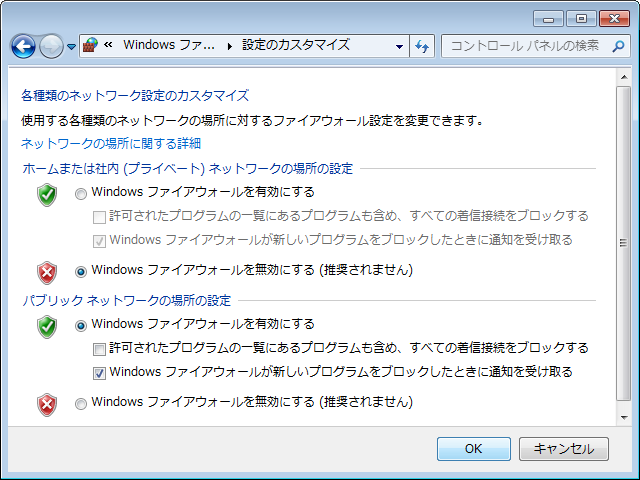
ホームまたは社内(プライベート)ネットワークの場所の設定の
「◎Windowsファイアウォールを無効にする(推奨されません)」 を選択し、
「OK」 をクリックします。
Apacheを再起動します。
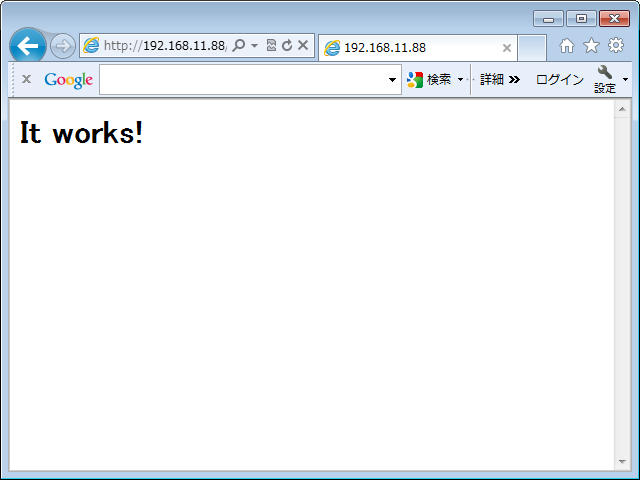
ここで、LANで接続された他のPCで閲覧できることを確認します。
ブラウザのアドレス欄に http://(サーバーPCのIPアドレス)/ と入力します。
もし、閲覧できないようであれば、他のインターネットセキュリティソフトが機能していることが考えられます。
他のインターネットセキュリティソフトを設定・停止するか、アンインストールします。
基本的には、ウイルス対策ソフトのみ必要です。
◆ Windowsファイアウォールの再設定
ルーター経由でインターネット接続されている場合、Windowsファイアウォール は無効でも構いません。
この場合、安全のため、ルーターのUPnPは無効にしてください。
ただし、VoIPやネットゲームなどを使う場合はルーターのUPnPが必要なので、以下の設定をしてください。
「ネットワークと共有センター」 を開き、
「Windowsファイアウォールの有効化または無効化」 をクリックし、
「◎Windowsファイアウォールを有効にする」 を選択し、
「OK」 をクリックします。
(元に戻しました)
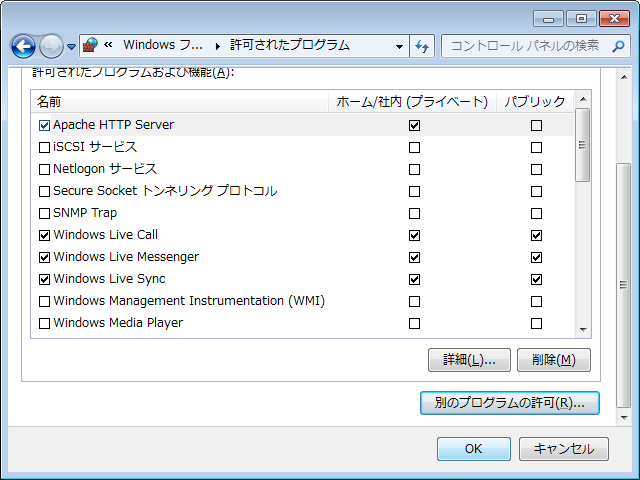
「Windowsファイアウォールを介したプログラムまたは機能を許可する」 をクリックします。
「設定の変更」 をクリックします。
「別のプログラムの許可」 をクリックします。
「参照」 をクリックします。
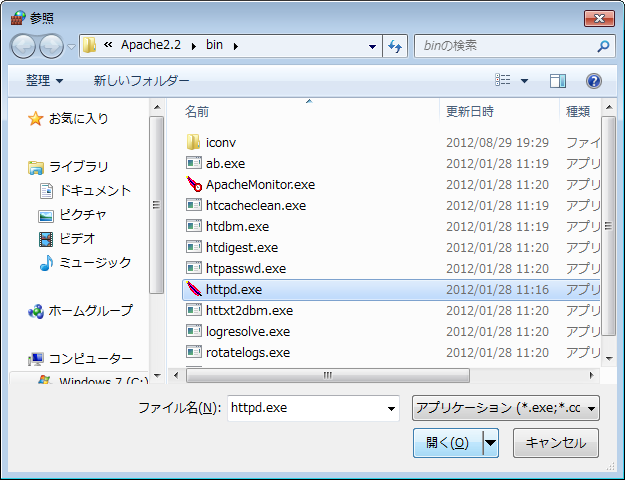
32bit版の場合
C:/Program Files/Apache Software Foundation/Apache2.2/bin/httpd.exe
64bit版の場合
C:/Program Files (x86)/Apache Software Foundation/Apache2.2/bin/httpd.exe
を選択し、
「開く」 をクリックします。
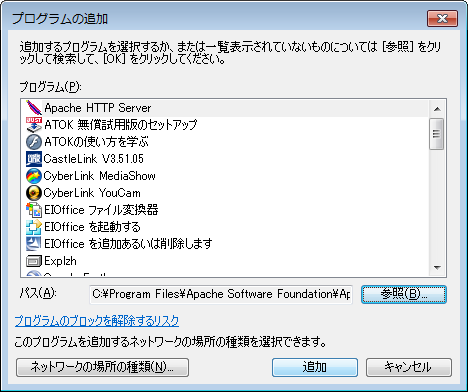
「追加」 をクリックします。
「OK」 をクリックします。
Apacheを再起動します。
もう一度、LANで接続された他のPCで閲覧できることを確認します。
◆ ルーターの設定
ここでは、Buffalo製WHR-G301Nを対象に説明します。
ブラウザに、ルーターの設定画面を表示させます。
多くの場合、アドレスはデフォルトゲートウェイと同じだと思います。
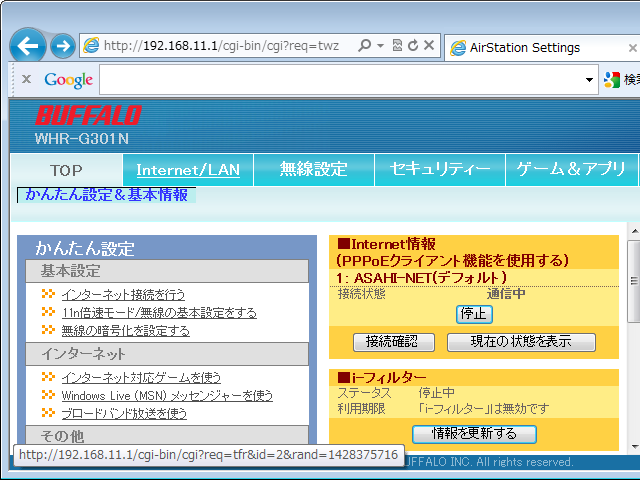
「Internet/LAN」 をクリックします。
「DHCPサーバー」 をクリックします。
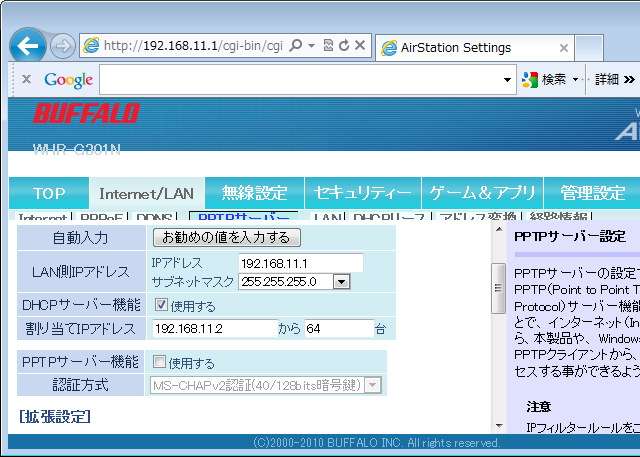
この例では、
割り当てIPアドレスが、192.168.11.2 から 64台 となっています。
つまり、192.168.11.2~192.168.11.65の範囲がDHCP割り当てになっているので、
サーバーPCのIPアドレスは、この範囲外にするとよいでしょう。
「ゲーム&アプリ」 をクリックします。
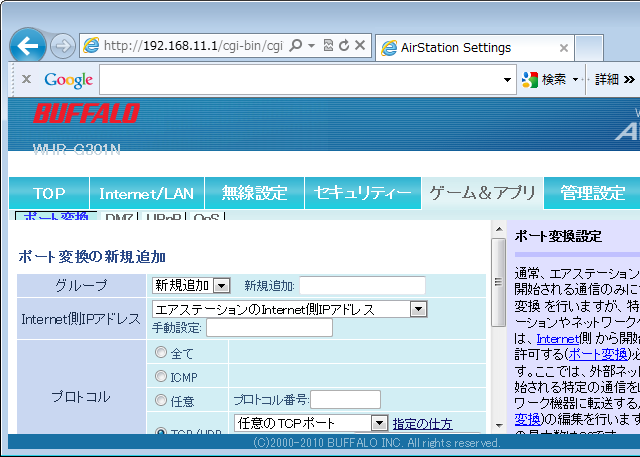
「ポート変換」 をクリックします。 (すでに、この画面になっていると思います。)
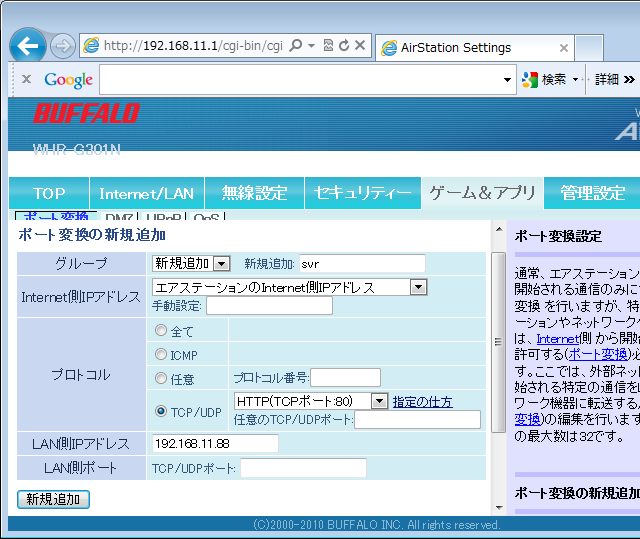
・グループの新規追加欄
任意の名前を記入します。
・プロトコル欄
TCP/UDPを選択し、「HTTP(TCPポート:80)」を選択します。
または、任意のTCPポートで、80を入力しても同じです。
・LAN側IPアドレス
サーバーPCのIPアドレスを記入します。
「新規追加」 をクリックします。
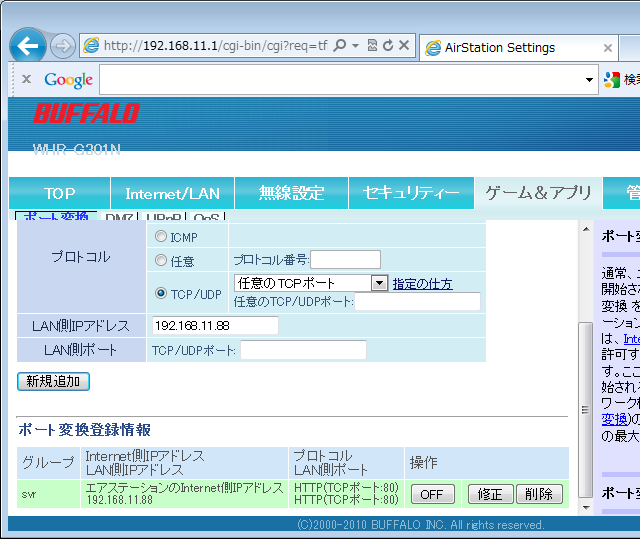
「操作」欄の
「OFF」・・・・・WAN側からアクセスできなくなります。
[修正]・・・・・サーバーPCのIPアドレスを変更した時など、修正ができます。
「UPnP」 をクリックします。
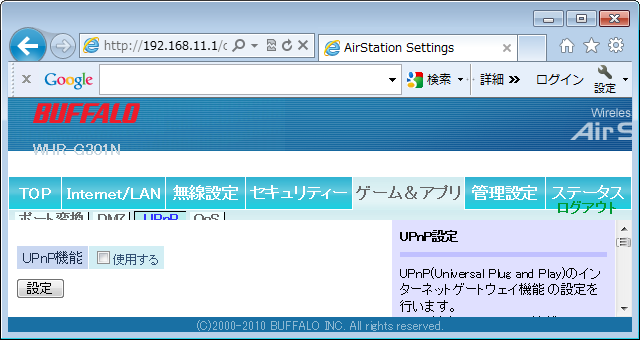
UPnP機能 ☑使用する のチェックを外します。
「設定」 をクリックします。
ただし、VoIPやネットゲームなどを使う場合は、UPnP機能が必要です。
◆ WAN側から(インターネット経由で)アクセスする
友人等に頼んで、インターネットに公開できているか、確認してもらいます。
アドレスは http://(WAN側のIPアドレス)/ となります。
WAN側のIPアドレスが分からない場合は、下をクリックしてください。
WAN側のIPアドレスを調べる
ただし、PROXYサーバー経由の場合、正しいアドレスは表示されません。
プロバイダとの契約で、固定IPを取得していない場合は、WAN側のIPアドレスが変化しますので注意してください。
ルーターを再起動した時などに変わります。
◆ ダイナミックDNS(DDNS)サービスを使う
DDNSサービスを使うと、IPアドレスだけでなく、「名前」でアクセスできるようになります。
ieServer.net を使ってみましょう。
http://www.ieserver.net/ にアクセス
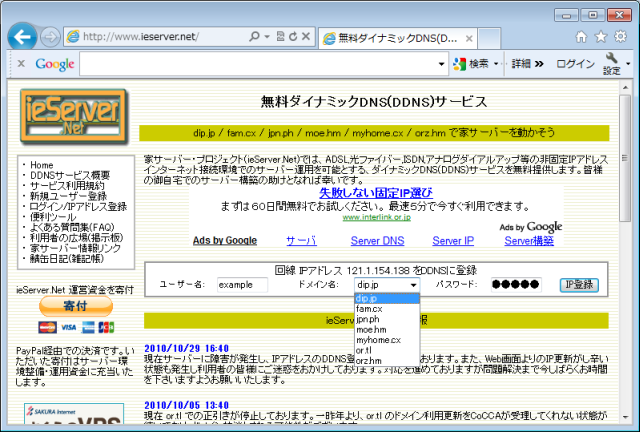
・任意の ユーザー名 を入力します。
・ドメイン名 を選択します。
・任意の パスワード を入力します。
・「IP登録」 をクリックします。
ユーザー名は、既に使われている場合が多いので、ドメイン名との組み合わせで、何回かトライする必要があります。
友人等に頼んで、名前でアクセスできるか、確認してもらいます。
アドレスは http://(DDNSの名前)/ となります。
(ここの例では)
アドレスは http://example.dip.jp/ となります。
・DNSの設定が反映されるまで、少し時間がかかります。
・ここの例で用いた example.dip.jp は使用できません。
・WAN側のIPアドレスが変化したときは、このページにログインする必要があります。
最近のルーターには、DDNSに対応した機能を備えているものもあります。
また、DiCE というソフト(無料)をインストールしておけば、自動で行えます。
Windows7でも使えるようです。